
بعد انتهاء الشهر الأوّل من العام الجديد على الأرض، تصل ثلاث سفنٍ فضائية إلى كوكب المرّيخ وجواره. وتبشّر هذه البعثات الاستكشافية التي انطلقت في يوليو (تموز) الفائت، بعامٍ جديد حافل بالاستكشاف الفضائي والإطلاقات والأحداث الفلكية.
فيما يلي، سنقدّم لكم موجزاً حول أهمّ الأحداث الفضائية التي سيشهدها عام 2021، ولكنّ الأمر لن يقف عند هذا الحدّ لأنّ الشركات الخاصّة ووكالات الفضاء حول العالم تخبئ المزيد.
لقاء مع المرّيخ
أطلقت كلّ من الإمارات العربية المتحدة والصين والولايات المتحدة بعثاتها الآلية الفضائية الخاصّة إلى المرّيخ الصيف الفائت تمهيدا للقيام برحلات قصيرة خلال الفترة التي تكون فيها الأرض أقرب إلى الكوكب الأحمر. ومن المزمع أن تنضمّ السفن الثلاث إلى مجموعة من البعثات الاستكشافية الموجودة إمّا في مدار الكوكب وإما على سطحه.
- مسبار الأمل. أوّل البعثات الواصلة سيكون مسبار الأمل الإماراتي والذي يعدّ أوّل مستكشف ترسله دولة عربية إلى الفضاء العميق في إطار برنامجٍ فضائي صغير ولكنه طموح. تخطّط هذه البعثة لدراسة الغلاف الجوي المريخي وحمل بيانات قيّمة للعلماء الموجودين على الأرض. ومن المتوقّع أن يصل المسبار إلى وجهته في السادس من فبراير (شباط) المقبل.
- مغامرة صينية. أمّا البعثة الصينية «تيانوين - 1»، فمن المزمع أن تصل إلى الكوكب الأحمر في العاشر من فبراير. وبعد إتمام دورة واحدة حوله، سترسل سفينة هبوط تضمّ عربة جوّالة إلى سطحه في مايو (أيار). ينطوي الهبوط السليم على سطح رابع كواكب المجموعة الشمسية على مخاطر كبيرة، حتّى أنّ وكالة نّاسا هي الوحيدة التي استطاعت النجاح بهذه المهمّة أكثر من مرّة. لهذا السبب، سيساهم نجاح هذه المهمّة في توسيع سجلّ إنجازات الصين الفضائية ولا سيّما بعد مرور عام على وصول بعثة «تشينج - 5» إلى سطح القمر وعودتها إلى الأرض حاملة حفنة من الصخور القمرية.
- عربة «ناسا». بعدها ببضعة أيّام فقط، وتحديداً في الثامن عشر من فبراير، تصل عربة «برزيفرانس» الجوّالة التابعة للوكالة وتهبط على سطح المرّيخ. وفي حال نجاحها، ستسعى هذه العربة للبحث عن حياة منقرضة في هوّة بحيرة ومجرى نهر جافين، ولكن ليس قبل إطلاق طوّافة «إنجنويتي» الصغيرة في مهمّة خاصّة كأوّل رحلة جوية في أجواء كوكب آخر.
التجوّل على القمر
هبطت الصين بسفنها الفضائية ثلاث مرّات على سطح القمر في السنوات السبع الماضية، في حين أنّ «ناسا» لم تزر الكوكب منذ عام 1972 أي عام هبوط بعثة أبولو. ولكنّ هذا الأمر قد يتغيّر في 2021، الأمر الذي سيزيد من جدية التحوّل التجاري في الجهود الأميركيّة الفضائية.
اعتمدت ناسا في العقد الأخير على الشركات الخاصّة لبناء وتشغيل السفن الفضائية التي قد تنقل الحمولات والبشر إلى المحطّة الفضائية الدولية، وها هي اليوم تحاول تطبيق المقاربة نفسها عبر برنامج الخدمات التجارية للحمولة القمرية الذي تعاقد مع عدد من الشركات الخاصّة لبناء سفن هبوط قمرية آلية مهمّتها نقل حمولات من ناسا وزبائن آخرين إلى سطح القمر.
ومن المقرّر أن تطلق الشركة الأولى «أستروبوتيك» ومقرها بيتسبرغ عربة هبوطها «بيريغرين» Peregrine إلى القمر في يونيو (حزيران) المقبل، والتي قد تتبعها عربة «نوفا - سي» Nova - C من تطوير شركة «إنتويتيف ماشينز أوف هيوستن».
تضع ناسا نصب عينيها هدفاً آخر هو إرسال روّاد فضاء إلى القمر مجدّداً خلال العقد الحالي وتخطّط لبدءِ مشروعها بإطلاق رحلة تجريبية غير مأهولة لنظام الإقلاع الفضائي (إس إل إس) الذي صممته للإطلاقات الأميركية الفضائية إلى الفضاء العميق. وقد واجه هذا الصاروخ حالات تأجيل عدّة وتكاليف متزايدة ولكنّ الوكالة لا تزال تخطّط لإطلاقه في رحلة «أرتميس - 1» هذا العام. كما أنّها سترسل كبسولة «أوريون» المخصّصة لروّاد الفضاء لتدور حول القمر وتعود، على أن يتمّ تنفيذ هذه الرحلة التجريبية في نوفمبر (تشرين الثاني) المقبل.
استكشاف الكون
ولكنّ البعثة الأهمّ التي ستشهدها الدوائر العلمية هذا العام والتي طال انتظارها هي إطلاق مرصد جايمس ويب الفضائي» James Webb Space Telescope الذي سيخلف مرصد «هابل». تأجّلت هذه البعثة لسنوات عديدة بسبب المشاكل التقنية والتكاليف المتزايدة ولكنّ ناسا وروّاد الفضاء وعلماء الكواكب حول العالم يتوقون لرؤيتها تنطلق في نهاية أكتوبر (تشرين الأول). حدّدت الوكالة هذا الإطار الزمني البعيد للإطلاق بسبب فيروس «كورونا» وغيره من المشاكل التي سببت المزيد من التأجيل في البرنامج المقرّر.
وتجدر الإشارة إلى أنّ سفينتين استكشافيتين أخريين تابعتين لـ«ناسا» ستتوجهان إلى المجموعة الشمسية في 2021.
تهدف سفينة «دوبل أستيرويد ريدايركشن تست» The Double Asteroid Redirection Test spacecraft والتي ستنطلق في يوليو المقبل، إلى اختبار ما إذا كانت السفن الفضائية قادرة على تغيير وجهة كويكب يتجه نحو سطح الأرض. لإتمام مهمّتها، ستزور هذه السفينة كويكبي «ديديموس» القريبين من الأرض واللذين يدوران حول الشمس سويا، على أن تحاول الاصطدام بالكويكب الأصغر بينهما لحرف مساره. وتعتزم السفينة الثانية «لوسي» Lucy والتي ستنطلق في أكتوبر لتسافر مسافة أبعد بكثير، الدوران حول المسار المداري لكوكب المشتري حيث ستعمل على دراسة كويكبات طروادة التي تسير في مدار المشتري نفسه ولكن على مسافة مئات ملايين الأميال وهي عالقة في مكانها بسبب جاذبيته القويّة. ويعتقد العلماء أن هذه الصخور الفضائية قد تساعد في كشف أسرار تكوين الكواكب الخارجية في المجموعة الشمسية.
مغامرات في المدار
شهد السفر البشري إلى الفضاء تحوّلاً كبيراً عام 2020 مع إرسال شركة «سبيس إكس» لطاقمين بشريين إلى المحطّة الفضائية. ومن المرجّح أن ترسل الشركة مزيداً من روّاد الفضاء إلى المدار هذا العام، على ألّا يكون جميعهم من العاملين في ناسا أو وكالات فضائية أخرى. تتعاون «سبيس إكس» مع عدد من الشركات الأخرى لإطلاق زبائن حجزوا لأنفسهم رحلة مدفوعة إلى الفضاء على متن كبسولة «كرو دراغون» وتخطّط «أكسيوم سبيس»، إحدى هذه الشركات، لإرسال أوّل الرحلات السياحية الخاصّة إلى المحطّة الفضائية في أواخر هذا العام.
عندما اختارت ناسا «سبيس إكس» لبناء مركبات تنقل روّادها، تعاونت أيضا مع شركة بوينغ للغاية نفسها. خلال رحلة تجريبية غير مأهولة إلى المدار في ديسمبر (كانون الأول) 2019 كادت سلسلة من الأخطاء أن تؤدّي إلى خسارة كارثية لكبسولة «ستارلاينر» من بوينغ. وكتعويض عن هذا الإطلاق الفاشل، أعلنت الشركة أنّها ستطلق رحلة تجريبية أخرى في شهر مارس (آذار) المقبل.
سيشهد هذا العام رحلات بشرية أخرى إلى الفضاء أيضاً أبرزها رحلتان تنظمهما شركتا «فيرجن غالاكتيك» و«بلو أوريغن» لإرسال زبائن تجاريين في رحلات قصيرة إلى مدخل الفضاء والعودة إلى الأرض. بدورها. وقد تبدأ الصين إطلاق قطع من محطّتها الفضائية المستقبلية خلال العام الجاري تمهيداً لوجودها البشري الدائم في مدار الأرض المنخفض والذي تخطّط له في السنوات المقبلة.
*خدمة «نيويورك تايمز»
2021... عام حافل باستكشاف الفضاء والكون
مهمات تصل إلى المرّيخ وعربات جوالة على القمر
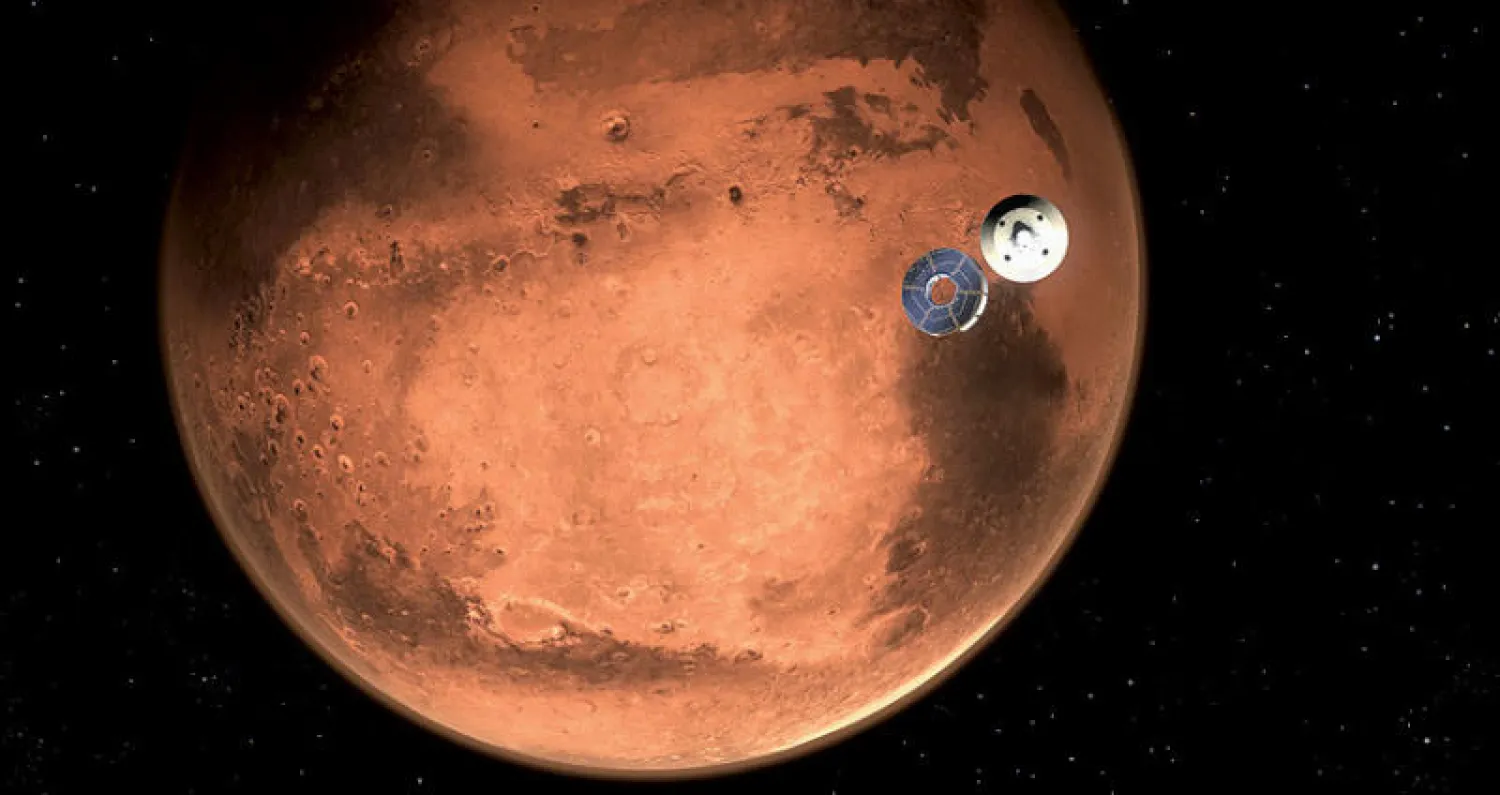
رسم تخيَلي لعربة «برزيفيرانس» عند انفصالها عن السفينة قبل دخولها الغلاف الجوي لكوكب المريخ
2021... عام حافل باستكشاف الفضاء والكون
رسم تخيَلي لعربة «برزيفيرانس» عند انفصالها عن السفينة قبل دخولها الغلاف الجوي لكوكب المريخ
مقالات ذات صلة












لم تشترك بعد
انشئ حساباً خاصاً بك لتحصل على أخبار مخصصة لك ولتتمتع بخاصية حفظ المقالات وتتلقى نشراتنا البريدية المتنوعة
