طوّر باحثون في الجامعة التقنية في ميونيخ نظاماً يجمع بين هيكل خارجي يرتديه العامل وذراع روبوتية تعاونية، بهدف تخفيف الجهد العضلي خلال رفع الأجسام ومناولتها داخل المصانع.
وأظهرت الاختبارات أن النظام يستطيع خفض الجهد الواقع على عضلات الذراعين بنسبة تصل إلى 65 في المائة، من خلال تنسيق المساعدة التي يقدمها الهيكل الخارجي مع المعلومات التي تجمعها الذراع الروبوتية عن وزن الجسم وطريقة توزيعه.
تعاون أقرب بين الإنسان والروبوت
تعمل الروبوتات في كثير من المصانع داخل مناطق منفصلة أو خلف حواجز أمان؛ حيث تنفذ مرحلة من العمل قبل أن ينتقل المنتج إلى العامل لإكمال المرحلة التالية. لكن هذه الآلية لا تلغي الحاجة إلى تنفيذ مهام جسدية متكررة، مثل رفع المكونات ووضعها خلال فحوص الجودة. وقد تؤدي هذه الحركات المتكررة إلى زيادة الإجهاد البدني؛ خصوصاً عندما تكون القطع ثقيلة أو غير متوازنة.
ويحاول النظام الجديد، الذي يحمل اسم «ويراكوب» «WearaCob»، جعل التعاون بين الإنسان والروبوت أكثر اتصالاً. ويجمع الاسم بين مفهوم الأجهزة القابلة للارتداء والروبوتات التعاونية؛ إذ يعمل الهيكل الخارجي الذي يرتديه العامل بالتنسيق مع ذراع روبوتية ذات مفصل واحد.
هيكل يُرتدى مثل حقيبة الظهر
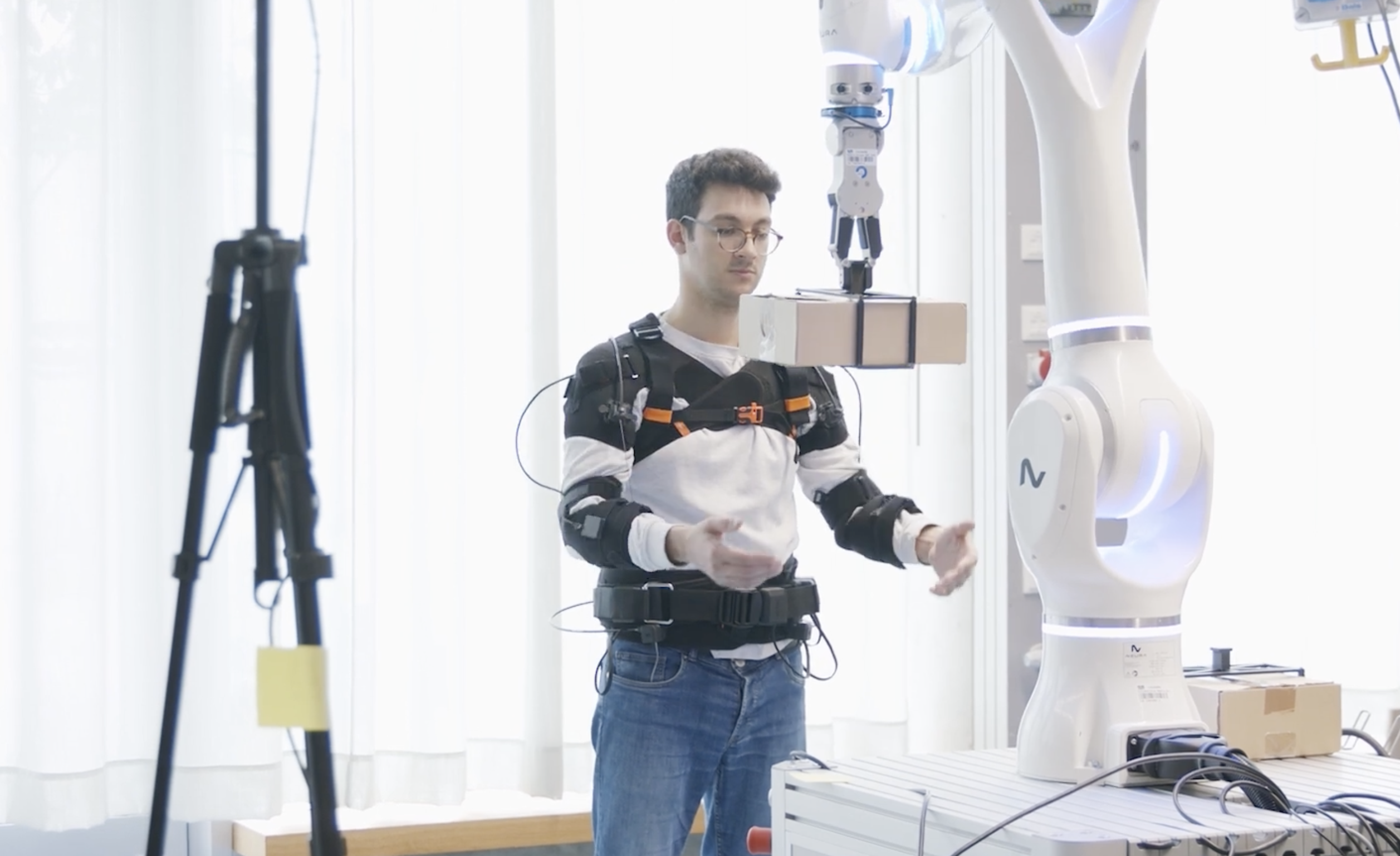
صُمم الهيكل الخارجي للجزء العلوي من الجسم، ويُرتدى بطريقة تشبه حقيبة الظهر. ويضم محركاً كهربائياً مثبتاً خلف المستخدم، تتصل به أسلاك رفيعة عالية المتانة تمر فوق الكتفين وترتبط بدعامات تشبه وسادات المرفق. وعندما يسحب المحرك هذه الأسلاك، فإنها تتحمل جزءاً من الجهد الذي تؤديه عادة عضلات العضد أثناء رفع الذراعين أو حمل الأجسام. وفي الوضع الأساسي، يعوض الهيكل وزن ذراعي المستخدم. لكنه يستطيع تقديم مساعدة إضافية عند حمل جسم، بناءً على البيانات التي ترسلها الذراع الروبوتية. وتلتقط الذراع الروبوتية الجسم المطلوب نقله وتحدد وزنه قبل تسليمه إلى العامل، ثم ترسل هذه المعلومة لاسلكياً إلى الهيكل الخارجي.
وبناءً على الوزن، يضبط النظام مقدار الدعم الذي يحصل عليه المستخدم، بحيث ترتفع المساعدة عندما تكون القطعة أثقل. ولا يقتصر الأمر على قياس الوزن، إذ يستطيع الروبوت أيضاً تحديد مركز كتلة الأجسام غير المتناظرة. وتتيح هذه الخاصية توزيع الدعم بصورة مختلفة بين ذراعي العامل. فإذا كان أحد جانبي القطعة أثقل من الآخر، يمكن للهيكل تقديم مساعدة أكبر للذراع التي تتحمل الحمل الأعلى، بما يساعد على موازنة الجسم خلال المناولة.
بديل عملي لقياس نشاط العضلات
يمكن للهيكل الخارجي أن يعمل بصورة مستقلة عن الذراع الروبوتية، لكن ذلك يتطلب عادة استخدام مستشعرات تقيس النشاط العضلي في الذراعين لتحديد مقدار الدعم المطلوب.
وتتميز هذه الطريقة بدقة مرتفعة، إذ يتراوح هامش الخطأ في تقدير الحمل بين 0.5 وكيلوغرام واحد. إلا أن تثبيت المستشعرات على ذراع العامل قبل كل استخدام قد يكون غير عملي في بيئة المصنع.
أما النظام المشترك فيعتمد على المعلومات التي تجمعها الذراع الروبوتية مباشرة عن الجسم؛ ما يسمح بتعديل المساعدة من دون الحاجة إلى إعداد مستشعرات العضلات في كل مرة.
سهولة تعليم الذراع الروبوتية
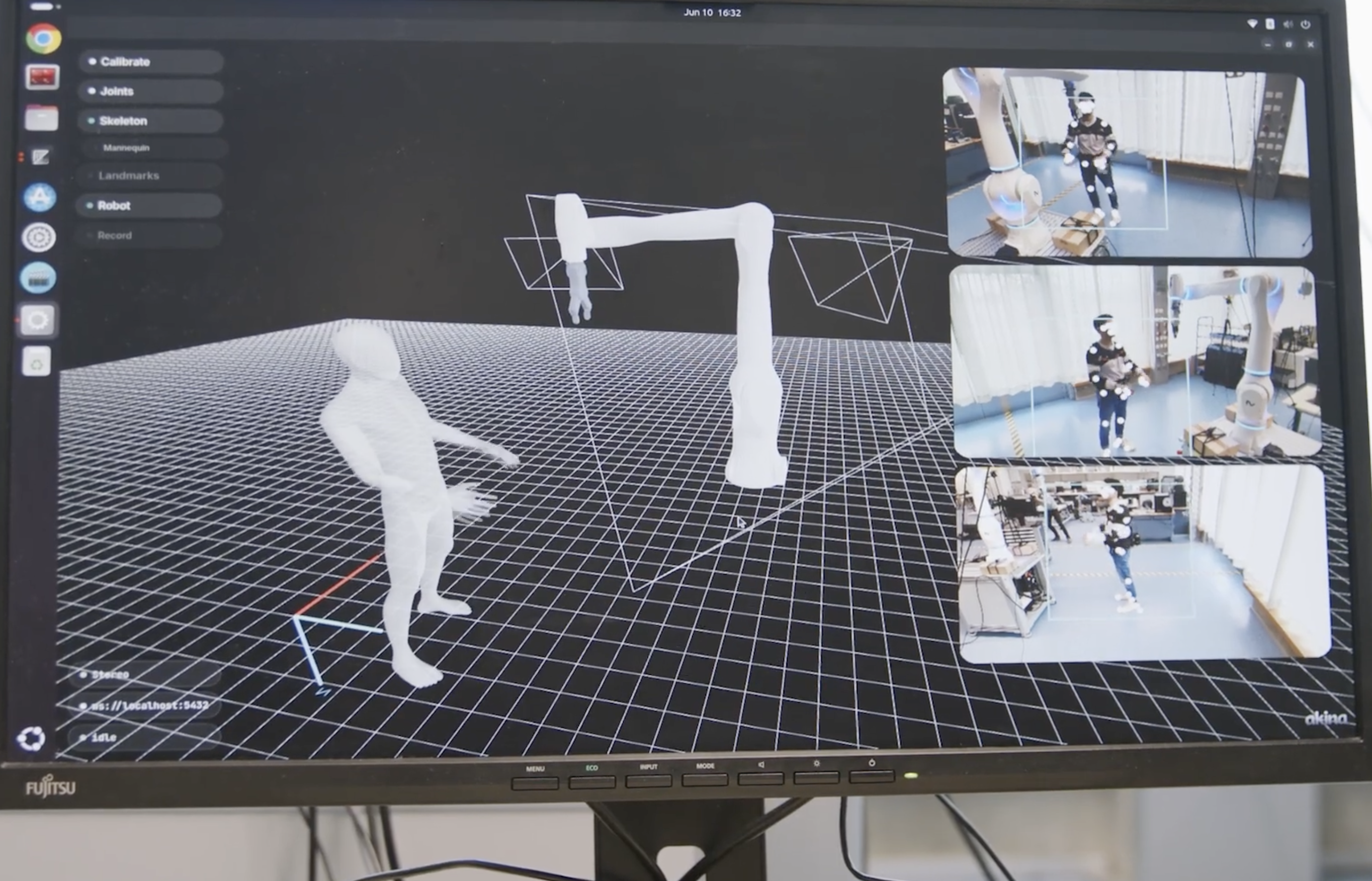
استخدم الباحثون ذراعاً روبوتية تعاونية مزودة بسبعة مفاصل، ما يمنحها مرونة في الحركة داخل مساحة العمل. كما يمكنها إبطاء حركتها تلقائياً عند الاقتراب من الأشخاص، وهي خاصية تساعد على جعل التعاون المباشر أكثر أماناً في البيئة البحثية.
ومن المزايا الأساسية للنظام سهولة تعليم الذراع الروبوتية مهام جديدة. فبدلاً من كتابة تعليمات برمجية، يستطيع المستخدم توجيه الذراع بيده عبر المسار المطلوب، لتتعلم الحركة من خلال العرض العملي.
ويرى الباحثون أن هذه الطريقة قد تقلل من التعقيد المرتبط بإعادة برمجة الروبوتات الصناعية، خصوصاً في خطوط الإنتاج التي تتغير فيها المهام أو المكونات باستمرار.

نحو تقليل الأعباء الجسدية
لا يهدف النظام إلى استبدال العامل، بل إلى توزيع العمل بين قدرات الإنسان والروبوت. فالذراع الروبوتية تتولى حمل الجسم وقياس خصائصه، بينما يقدم الهيكل الخارجي دعماً يتناسب مع احتياجات العامل خلال تسلُّمه وفحصه أو نقله. وتشير النتائج إلى إمكانية استخدام هذا النوع من التعاون لتخفيف الأعباء الجسدية في المهام الصناعية المتكررة، مع الحفاظ على دور العامل في العمليات التي تحتاج إلى التقدير البشري والمرونة. لكن النظام لا يزال مشروعاً بحثياً، ولم يذكر الباحثون موعداً لطرحه تجارياً. وتتمثل الخطوة الحالية في إثبات إمكانية ربط الروبوتات التعاونية بالأجهزة القابلة للارتداء ضمن إطار واحد، بحيث تتبادل المعلومات وتوفر دعماً يتكيف مع كل جسم ومهمة.