طوَّر باحثون من جامعتي دريكسل وميشيغان ستيت نموذجاً أولياً لنظام باسم «بايو كوتش» (BioCoach) يستخدم الذكاء الاصطناعي والرؤية الحاسوبية، لتحليل حركة الجسم أثناء التمرين، وتقديم ملاحظات فورية ومفسّرة حول الأخطاء في الأداء. الفكرة الأساسية هي تقريب تجربة المستخدم من مدرّب بشري يراقب الحركة ويشرح سبب التصحيح، لا مجرد تطبيق يقدّم تشجيعاً عاماً أو تعليمات ثابتة.
يتبع كثير من المستخدمين مقاطع فيديو أو تطبيقات، من دون أن يعرفوا إن كانوا يؤدون الحركة بشكل صحيح. وخلال فترة جائحة «كوفيد - 19»، ارتفعت إصابات التمارين المنزلية في الولايات المتحدة بنسبة 48 في المائة، بحسب ما ورد في التقرير، نقلاً عن لجنة سلامة المنتجات الاستهلاكية الأميركية. لذلك يحاول الباحثون تطوير نظام يساعد المستخدم على تصحيح الحركة في الوقت المناسب، قبل أن يتحول الخطأ المتكرر إلى إصابة.
قراءة ميكانيكا الجسم
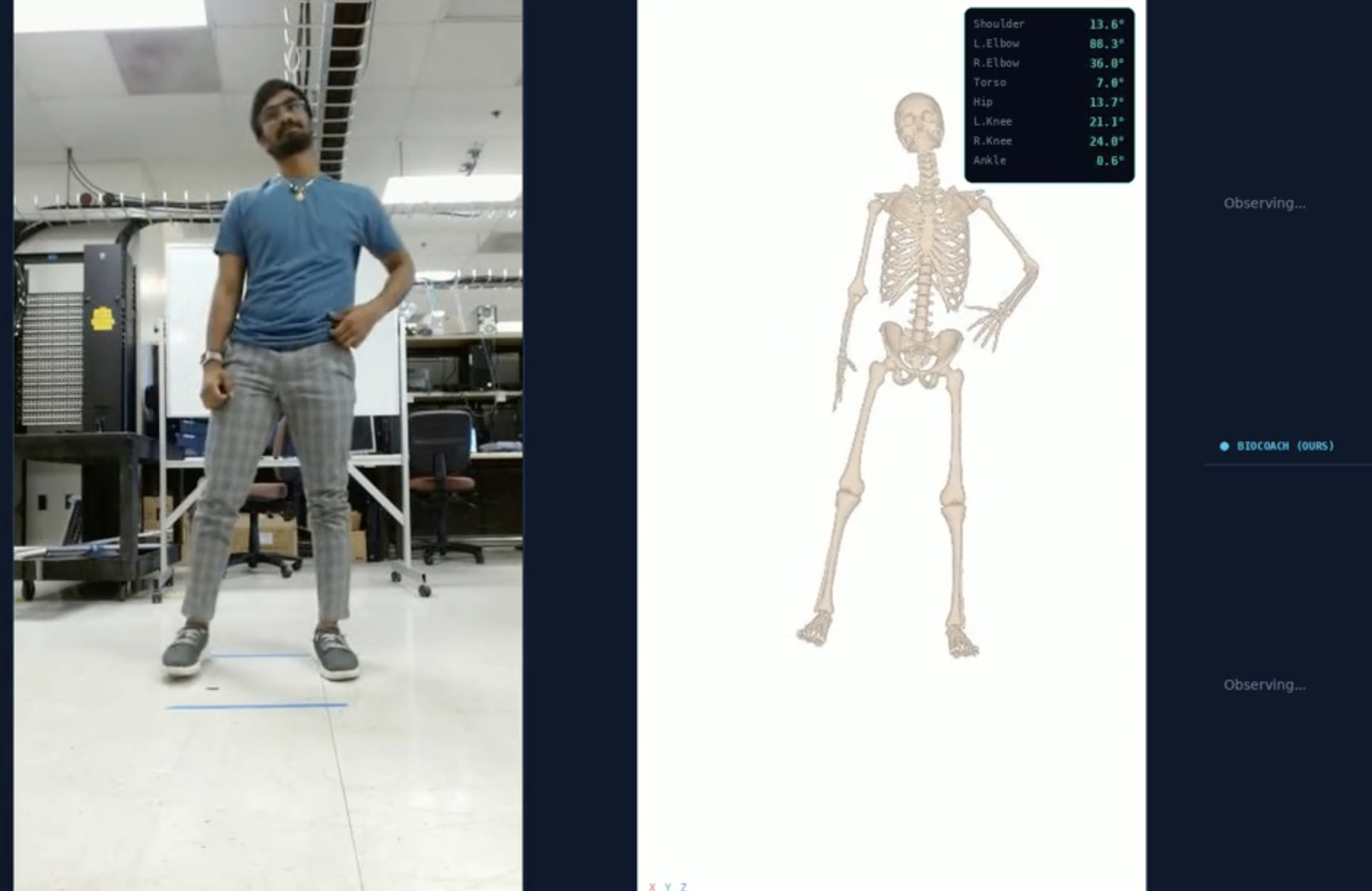
يعتمد «BioCoach» على دمج أكثر من طبقة تقنية؛ فهو لا ينظر إلى الفيديو كصور فقط، بل يحاول فهم الحركة من زاوية ميكانيكية حيوية. النظام يستخدم نموذجاً للرؤية الحاسوبية لتحليل أنماط الحركة، إلى جانب تقدير ثلاثي الأبعاد لوضعية الهيكل العظمي وشكل الجسم. وهذا يسمح له بقراءة زوايا المفاصل، ومدى الحركة، ومراحل التمرين، مثل النزول والصعود في تمرين القرفصاء أو وضعية الذراعين في تمارين الضغط.
بمعنى أبسط، لا يقول النظام للمستخدم فقط: «حرّك جسمك بشكل أفضل». بل يمكنه أن يحدد المفصل المرتبط بالخطأ، مثل الركبة أو الورك أو الكوع، ثم يشرح لماذا يجب تعديل الحركة.
على سبيل المثال، بدلاً من ملاحظة عامة، مثل: «انزل أكثر»، قد يقدّم توجيهاً أكثر دقة حول زيادة ثني المرفق أو الورك أو الركبة، مع تفسير أن هذا يساعد على توزيع الحمل بشكل أفضل أثناء التمرين.

أهمية توقيت النصيحة
ولبناء النظام، اعتمد الفريق على مجموعة بيانات عامة تُعرف باسم «Qualcomm Exercise Video Dataset»، وتضم مئات الساعات من مقاطع التمارين مع ملاحظات تدريبية مرتبطة بالتوقيت. لكن الباحثين رأوا أن كثيراً من هذه الملاحظات كان قصيراً أو عاماً، لذلك أعادوا شرحها بإضافات أكثر تفصيلاً من الناحية الحركية. وفي النهاية، أضافوا أكثر من 2400 ملاحظة إلى أكثر من 200 مقطع فيديو لتدريب النظام واختباره.
الميزة المهمة هنا ليست فقط دقة النصائح، بل توقيتها. لأن النصيحة التي تأتي بعد انتهاء الحركة قد لا تساعد كثيراً. لذلك احتفظ الباحثون بالطابع الزمني للملاحظات، كي يتمكنوا من تقييم ما إذا كان النظام يقدّم التصحيح في اللحظة المناسبة، وليس فقط ما إذا كان التصحيح صحيحاً من حيث المضمون.
نتائج واعدة أولياً
اختبر الباحثون نظام «بايو كوتش» في مواجهة نماذج ذكاء اصطناعي أخرى طورتها فرق من شركات ومؤسسات بحثية كبرى، من بينها «إنفيديا» و«بايت دانس»، و«علي بابا» و«أوبن أيه آي» و«MIT» وجهات أكاديمية صينية. ووفقاً للنتائج الواردة في التقرير، تفوّق «BioCoach » على أقرب منافسيه في جودة النص وصحة التوجيه عند مقارنته بالبيانات الأصلية، كما حقق أداء أفضل عبر المقاييس، عند تقييمه مقابل النسخة المحسنة التي أضاف إليها الباحثون تعليقات أكثر دقة.

ليس بديلاً للخبراء
لا يزال المشروع في مرحلة النموذج الأولي، كما أن الورقة منشورة على منصة «arXiv» كبحث تمهيدي قبل عرضه في مؤتمر الرؤية الحاسوبية والتعرف على الأنماط «CVPR»، وهذا يعني أن التقنية لم تتحول بعد إلى منتج جاهز للاستخدام الواسع، ولا يمكن التعامل معها كبديل كامل للمدربين أو المختصين؛ خصوصاً في حالات الإصابات أو برامج العلاج الطبيعي.
إذا تطورت هذه الأنظمة، فقد تساعد تطبيقات اللياقة والعلاج الطبيعي على تقديم توجيه أكثر تخصيصاً للمستخدمين أثناء التدريب الفردي، مع بقاء الخبراء البشريين داخل الحلقة عند الحاجة. ويعمل الفريق البحثي لاحقاً على تحسين قدرة النظام على تقدير قوى المفاصل ونشاط العضلات من الفيديو، بهدف رصد الحركات التعويضية الصغيرة التي قد تؤدي إلى إصابات مع التكرار.
بهذا المعنى، لا تكمن أهمية «بايو كوتش» في أنه «مدرّب افتراضي» فقط، بل في أنه يحاول جعل الذكاء الاصطناعي أكثر فهماً لحركة الجسم، وأكثر قدرة على تفسير النصيحة التي يقدمها. فالفرق بين تطبيق يعرض تمريناً وتطبيق يفهم الخطأ أثناء الحركة قد يكون حاسماً في مستقبل التدريب المنزلي.