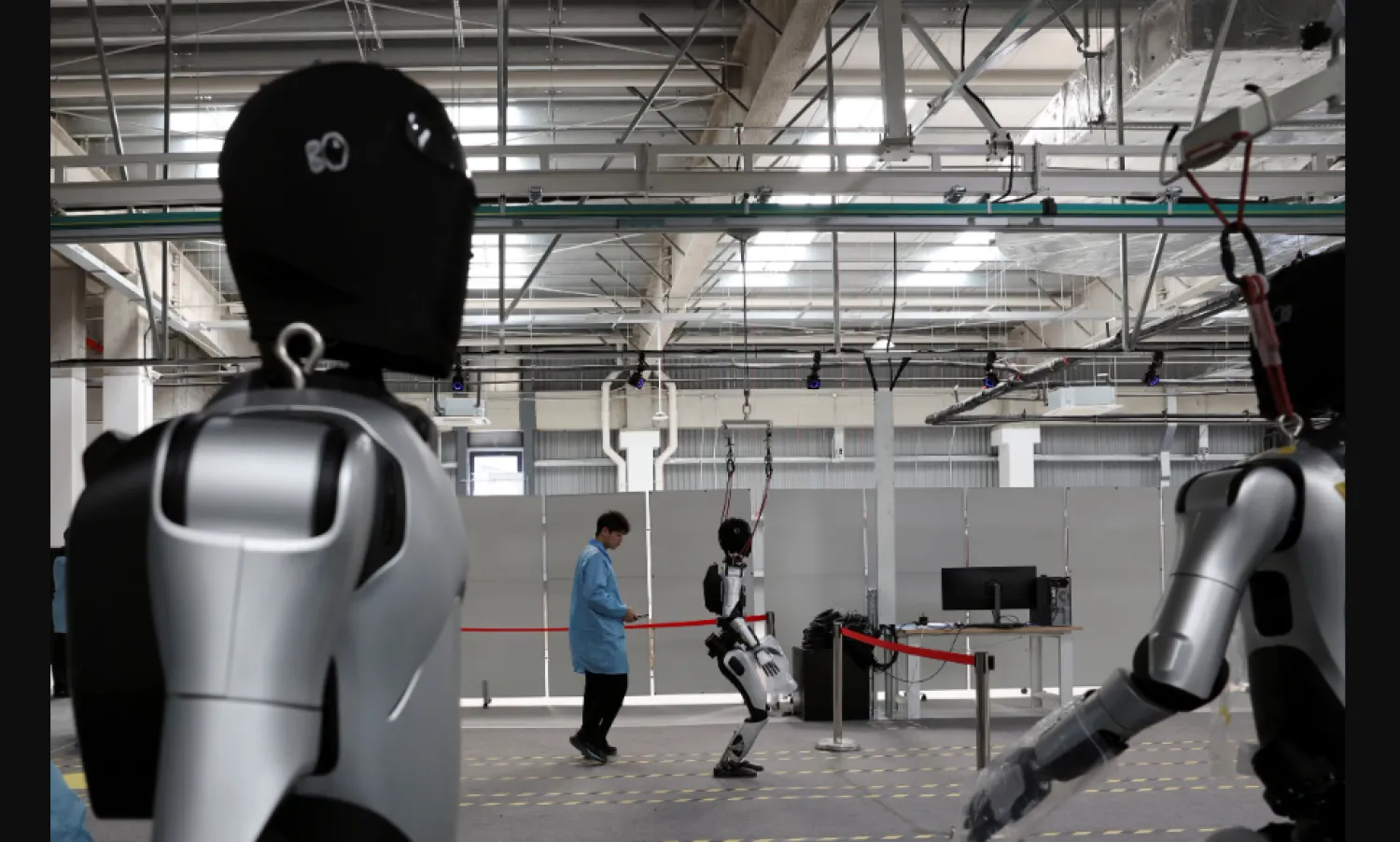
قد تستعين السلطات الصينية بروبوتات شبيهة بالبشر لتوجيه المسافرين، وتنظيم الحشود عند بعض المعابر الحدودية؛ إذ أعلنت شركة «يوبيتك روبوتيكس» في مدينة شنتشن فوزها بعقد بملايين الدولارات لإشراك أحدث طرازاتها في مشروع تجريبي.
وقالت الشركة، أمس الثلاثاء، إنها أبرمت صفقة بقيمة 37 مليون دولار مع مركز لاختبار الروبوتات الشبيهة بالبشر يقع بالقرب من الحدود الصينية مع فيتنام.
وسيستخدم المشروع بشكل أساسي أحدث إصدار من روبوتات «ووكر» الشبيهة بالبشر من «يوبيتك» لاختبار تطبيقات عملية، كالمساعدة في إدارة الحدود، وإدارة الخدمات اللوجيستية.
وأعلنت «يوبيتك» أنها ستبدأ بتسليم الروبوتات إلى المركز في ديسمبر (كانون الأول).
وقد شجعت الحكومة الصينية الشركات المحلية على تطوير روبوتات شبيهة بالبشر، سعياً منها إلى أن تتبوأ صدارة هذا القطاع عالمياً.
وتوقع تقريرٌ نشرته شركة «ليدر روبوت» الاستشارية المتخصصة في أبريل (نيسان) أن يبلغ حجم صناعة الروبوتات الشبيهة بالبشر في الصين 82 مليار يوان (11.6 مليار دولار) سنة 2025، وهو ما يمثل نصف المبيعات العالمية.