

في مسار تطوير الروبوتات البشرية، ظل التحدي الأكبر يتمثل في تعليم الآلات مهارات حركية معقدة تحاكي الإنسان. فالمهام التي تبدو طبيعية للبشر، مثل الجري أو القفز أو حتى لعب التنس، تتطلب تنسيقاً دقيقاً بين التوازن، والتوقيت، واتخاذ القرار في أجزاء من الثانية. تقليد هذه القدرات آلياً لم يكن ممكناً إلا في بيئات محدودة، وغالباً عبر بيانات مثالية يصعب الحصول عليها في الواقع.
لكن دراسة حديثة تقترح مساراً مختلفاً: ماذا لو لم تعد الحاجة إلى بيانات مثالية شرطاً أساسياً لتعليم الروبوتات؟
يركز البحث على تطوير نموذج لتعليم روبوت بشري مهارات لعب التنس، باستخدام بيانات حركة بشرية غير مكتملة أو غير دقيقة. وبدلاً من الاعتماد على تسجيلات كاملة ومضبوطة للحركات، يعمل النظام على استغلال مقاطع جزئية من البيانات، ثم إعادة تركيبها لبناء سلوك حركي متكامل.

من البيانات المثالية إلى البيانات الواقعية
تقليدياً، تعتمد أنظمة التعلم الحركي للروبوتات على بيانات عالية الجودة، يتم التقاطها باستخدام أنظمة متقدمة لتتبع الحركة. هذه البيانات توفر وصفاً دقيقاً لكل حركة، لكنها مكلفة وصعبة التوسّع، كما أنها لا تعكس دائماً تعقيد العالم الحقيقي. في المقابل، ينطلق هذا البحث من فرضية مختلفة، حيث إن البيانات الواقعية حتى وإن كانت غير كاملة، يمكن أن تكون كافية لتعليم مهارات معقدة، إذا تم التعامل معها بطريقة مناسبة.
وهنا، لا يحاول النموذج «تنقية» البيانات بقدر ما يعمل على فهم الأنماط الكامنة فيها، واستنتاج كيفية تحويلها إلى حركات قابلة للتنفيذ.
نموذج يتعلم من أجزاء متفرقة
يعتمد النظام المقترح على تقسيم البيانات الحركية إلى مقاطع صغيرة، تمثل كل منها جزءاً من حركة أكبر. ثم يقوم بربط هذه الأجزاء معاً داخل بيئة محاكاة، بحيث يتعلم الروبوت كيفية الانتقال من حركة إلى أخرى بسلاسة. هذه المقاربة تشبه إلى حد ما الطريقة التي يتعلم بها الإنسان مهارة جديدة، حيث يتم الجمع بين تجارب جزئية لتشكيل أداء متكامل. والنتيجة هي نموذج قادر على توليد حركات ديناميكية، دون الحاجة إلى مسار واحد محدد مسبقاً.
التنس كنموذج لاختبار التعقيد
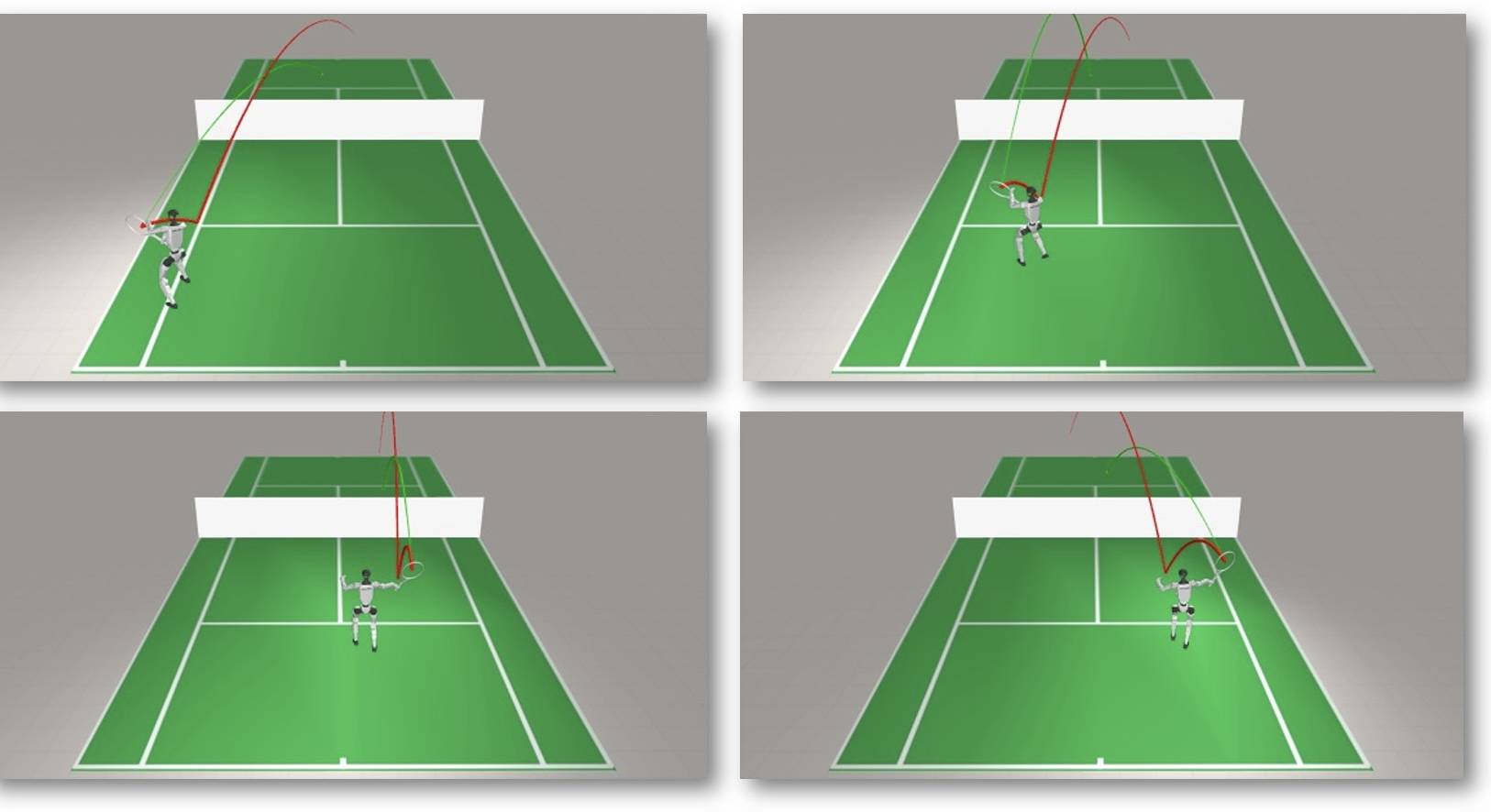
اختار الباحثون لعبة التنس كبيئة اختبار، نظراً لما تتطلبه من تنسيق بين الحركة والإدراك. فالتعامل مع كرة متحركة يستدعي تقدير السرعة والاتجاه، واتخاذ قرار فوري بشأن كيفية الرد، ثم تنفيذ الحركة بدقة. في التجارب، تمكّن الروبوت من تعلم ضرب الكرة والتفاعل مع مواقف مختلفة، بما في ذلك الحفاظ على تبادل الكرات في بعض الحالات. ويشير ذلك إلى أن النموذج لا يقتصر على تكرار حركات محفوظة، بل يطوّر استجابة قابلة للتكيف مع السياق.
فجوة بين المحاكاة والواقع
كما هو الحال في كثير من أبحاث الروبوتات، يعتمد جزء كبير من التدريب على بيئات محاكاة. هذه البيئات تتيح تسريع عملية التعلم وتقليل المخاطر، لكنها لا تعكس دائماً تعقيدات العالم الحقيقي.
لذلك، يمثل نقل المهارات من المحاكاة إلى الواقع أحد التحديات الأساسية. وقد عمل الباحثون على تقليل هذه الفجوة عبر تصميم النموذج بحيث يأخذ في الاعتبار التباين وعدم الدقة في البيانات، وهو ما يجعله أكثر قدرة على التكيف عند التطبيق العملي.
ما الذي يتغير فعلاً؟
لا تكمن أهمية هذا البحث في قدرة الروبوت على لعب التنس بحد ذاتها، بل في ما تشير إليه من تحول أوسع في منهجية التعلم. فإذا كان بالإمكان تدريب الأنظمة على مهارات معقدة باستخدام بيانات غير مثالية، فإن ذلك يفتح الباب أمام استخدام مصادر بيانات أكثر تنوعاً، مثل الفيديوهات العامة أو التسجيلات غير المنظمة. وهذا بدوره قد يسرّع تطوير ما يُعرف بـ«الذكاء الاصطناعي المجسّد»، حيث تتفاعل الأنظمة مع العالم الفيزيائي بشكل مباشر.
حدود وتحديات قائمة
مع ذلك، لا تزال هذه المقاربة في مراحلها الأولى. فالروبوت لا يصل إلى مستوى الأداء البشري، ولا تزال قدرته على التعامل مع مواقف غير متوقعة محدودة. كما أن الاعتماد على المحاكاة يفرض قيوداً على مدى تعميم النتائج. لكن رغم هذه التحديات، يقدم البحث دليلاً على أن الطريق نحو تعليم الروبوتات قد لا يمر عبر الكمال، بل عبر القدرة على الاستفادة من النقص.
يشير هذا التوجه إلى إعادة التفكير في العلاقة بين البيانات والتعلم. فبدلاً من السعي إلى جمع بيانات مثالية ومكتملة، قد يكون التركيز مستقبلاً على تطوير نماذج قادرة على التعلم من الواقع كما هو بما يحمله من نقص وتباين. وفي هذا السياق، لا يمثل التنس سوى مثال تجريبي. أما الهدف الأوسع، فهو تمكين الروبوتات من اكتساب مهارات حركية متنوعة، تتراوح بين العمل الصناعي والخدمات اليومية.





