اختبر باحثون في النرويج روبوتاً ذاتي التشغيل تحت الماء استطاع تنفيذ مهام تفتيش لبنية تحتية بحرية، ثم العودة تلقائياً إلى محطة ثابتة في قاع البحر لإعادة شحن بطاريته، ونقل البيانات التي جمعها.
وأجريت التجارب على عمق 90 متراً بمضيق تروندهايم، في خطوة تهدف إلى تطوير روبوتات يمكنها البقاء تحت الماء لأشهر أو سنوات، بدلاً من إعادتها إلى السفن أو البر لإجراء الصيانة والشحن بعد كل مهمة.
تزداد الحاجة إلى مراقبة خطوط الأنابيب وكابلات الاتصالات والطاقة والمنشآت البحرية، مع توسع النشاط الاقتصادي في البحار وارتفاع المخاوف المرتبطة بأمن البنية التحتية تحت الماء.
وتعتمد عمليات التفتيش الحالية غالباً على سفن كبيرة مزودة بأجهزة سونار، أو مركبات تحت الماء ترافقها سفن دعم وفرق تشغيل. وتتطلب هذه العمليات أعداداً كبيرة من العاملين، إضافة إلى تكاليف مرتفعة وانبعاثات كربونية ناتجة عن تشغيل السفن لفترات طويلة.
ويهدف المشروع الجديد إلى استبدال روبوتات «مقيمة» في البحر بجزء من هذا النموذج، تنطلق من قواعد ثابتة في القاع، وتنفذ مهام التفتيش عند الحاجة، ثم تعود إلى محطاتها من دون تدخل بشري مباشر.
وقال مارتن لودفيغسن، الأستاذ في قسم التكنولوجيا البحرية بالجامعة النرويجية للعلوم والتكنولوجيا، إن هذه الروبوتات قد تؤدي دوراً مهماً في مراقبة البنية التحتية وحمايتها، من دون الاعتماد المستمر على سفن سطحية مكلفة.

روبوت يزن 10 كيلوغرامات
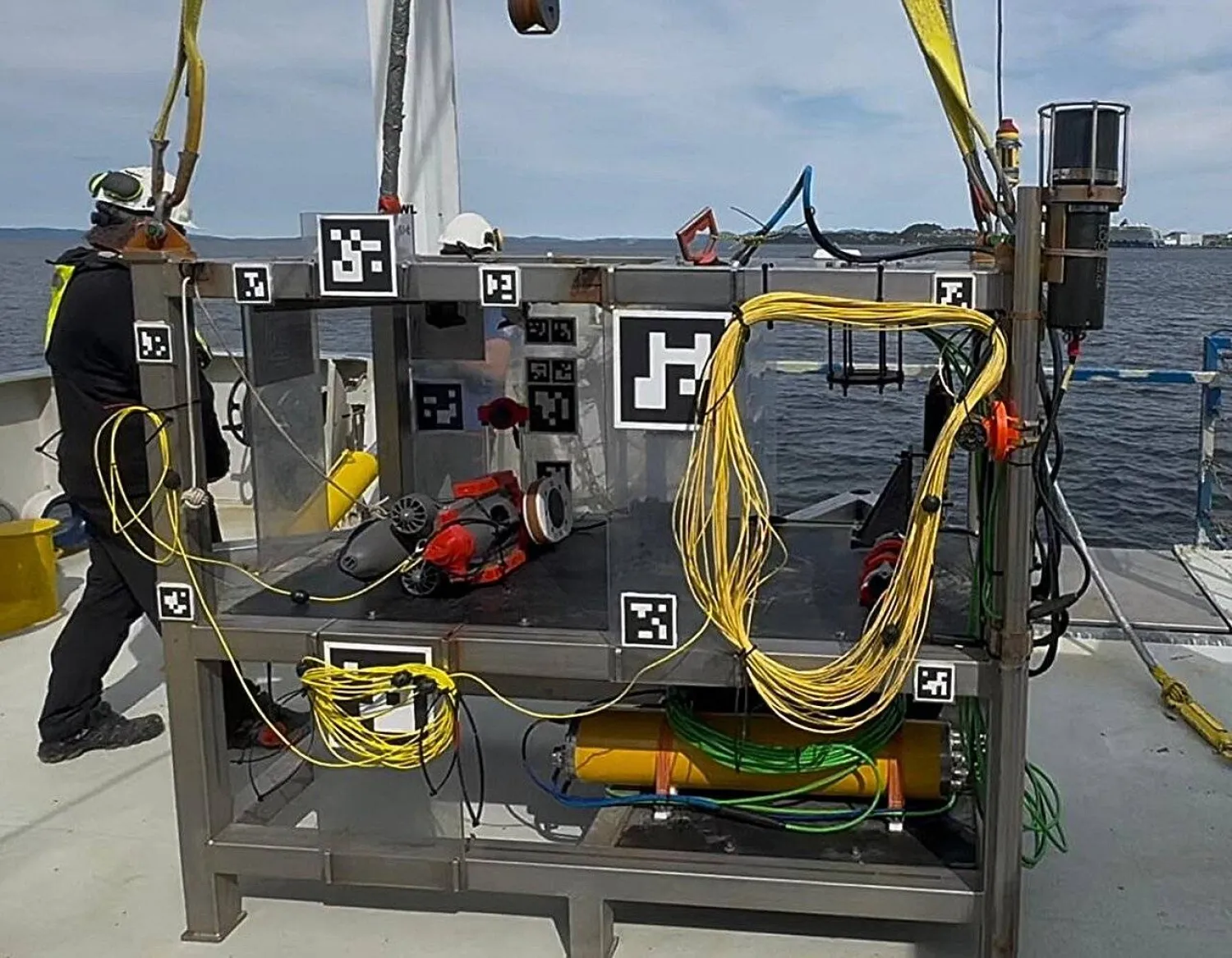
استخدم الباحثون خلال الاختبارات روبوتاً من طراز «Blueye X3» يزن نحو 10 كيلوغرامات، جرى تجهيزه بكاميرا وسونار وحساسات ومعدات اتصال وشاحن حثي ونظام تثبيت مغناطيسي.
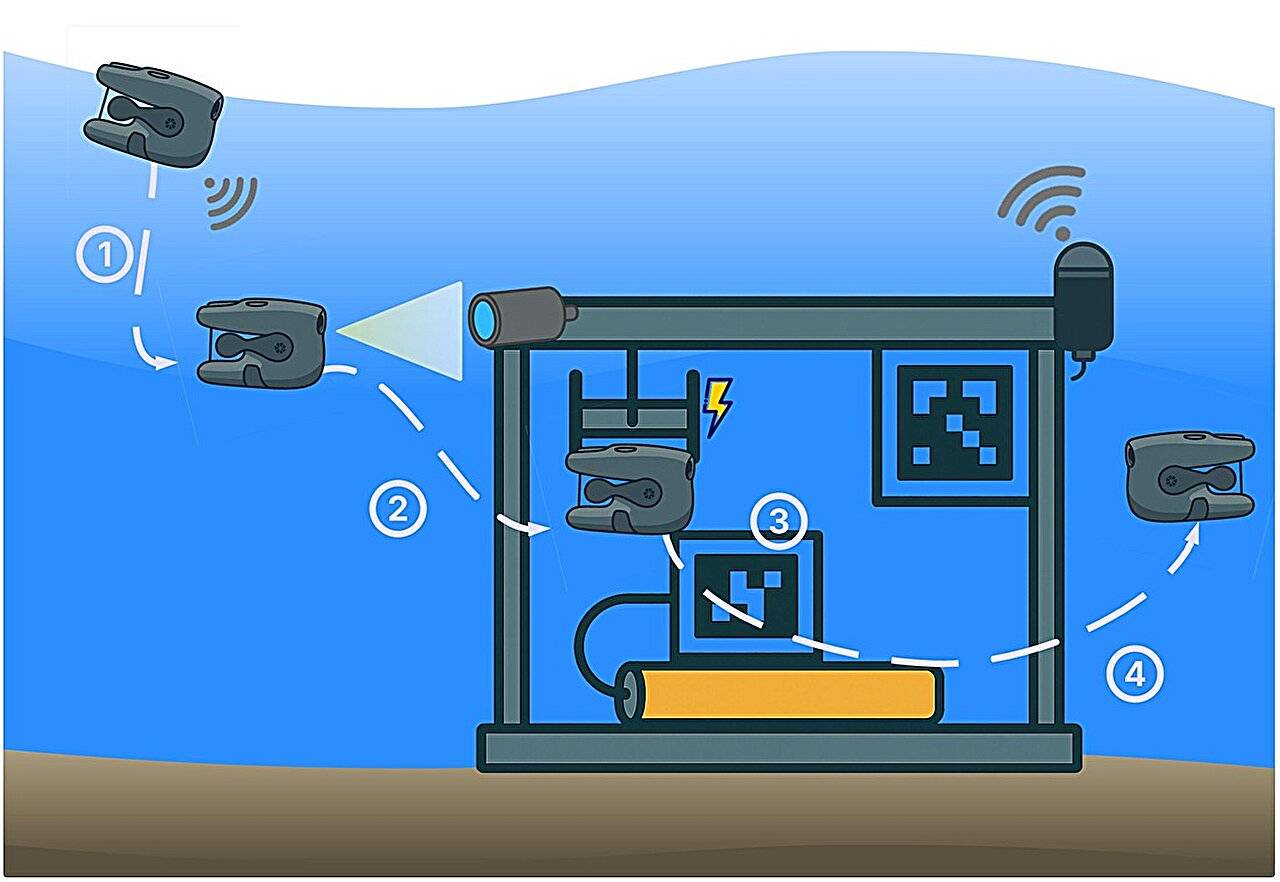
وبعد انتهاء المهمة، يستخدم الروبوت مجموعة من تقنيات الملاحة للعثور على محطة الشحن والاتصال بها. ويعتمد أولاً على أنظمة صوتية لتحديد الموقع والتواصل منخفض السرعة، ثم ينتقل إلى الإرشاد البصري عند الاقتراب من المحطة، حيث تقرأ الكاميرا علامات محددة، وتستخدم تقنيات الرؤية الحاسوبية لتوجيهه إلى نقطة الالتحام.
وعند الاتصال بالمحطة، يبدأ نقل البيانات بسرعة أعلى، بينما تُشحن البطارية لاسلكياً عبر الحث. وترتبط محطة القاع بمنشآت على اليابسة، بواسطة كابل يوفر الطاقة والاتصال.
نجاح بنسبة 90 %
نُشر النظام في مناسبتين، وحقق ما مجموعه أربعة أسابيع من الخدمة التشغيلية. وخلال هذه الفترة، أكمل الروبوت مهام التفتيش، وسجَّل معدل نجاح بلغ 90 في المائة في العودة والالتحام بمحطة الشحن.
ورغم أن النتيجة تشير إلى إمكانية تكرار العملية، يرى الفريق أن النسبة يجب أن تصل إلى 100 في المائة، قبل الاعتماد على النظام بصورة مستقلة.
وقال لودفيغسن إن نجاح الالتحام أمر حاسم، لأن عدم قدرة الروبوت على العودة إلى المحطة قد يعني فقدانه وعدم إمكانية استعادته، خصوصاً عند تشغيله من دون وجود مشغل أو سفينة دعم قريبة.
ولهذا السبب، أُجريت الاختبارات الحالية باستخدام حبل أمان يسمح باستعادة الروبوت عند الضرورة. وسيستمر استخدام وسائل الاسترجاع الاحتياطية في التجارب المقبلة إلى أن يثبت النظام قدرته على العمل ذاتياً بصورة موثوقة.

صعوبة الملاحة تحت الماء
تختلف الملاحة في أعماق البحر عن الحركة على اليابسة أو فوق سطح الماء، لأن إشارات أنظمة تحديد المواقع العالمية لا تصل إلى الأعماق. ويحتاج الروبوت إلى الجمع بين عدة وسائل لتقدير موقعه واتجاهه، تشمل الجيروسكوبات ومقاييس التسارع وأنظمة الملاحة بالقصور الذاتي، إضافة إلى تقنيات صوتية تقيس الحركة بالنسبة إلى قاع البحر. وتستهلك هذه الأنظمة قدرة حاسوبية وطاقة، ما يجعل تحسين الملاحة والكفاءة من أبرز التحديات أمام التشغيل الطويل. كما كشفت الاختبارات عن مشكلات غير متوقَّعة في الرؤية الحاسوبية. فعندما كانت الأسماك تمر أمام الكاميرا، كانت تربك البرنامج المسؤول عن تفسير الصور، وهو ما يدفع الباحثين إلى تحسين قدرة النظام على التمييز بين الأجسام والبيئة المحيطة.
من التجارب إلى التشغيل التجاري
لا يزال المشروع في مرحلة التطوير، وتبقى أمام الباحثين تحديات تتعلق بمتانة محطات الالتحام، والاستقلالية الكاملة، والاتصال، والحفاظ على المسار والاتجاه، إضافة إلى خفض التكلفة.
ويرى الفريق أن الحوادث التي استهدفت خطوط الأنابيب وكابلات الاتصالات والطاقة رفعت الحاجة إلى حلول أبسط وأكثر انتشاراً لمراقبة قاع البحر. ولا توجد حتى الآن منظومة تجارية جاهزة للعمل الدائم من دون إشراف، لكن الباحثين يرون أن التجارب أثبتت قابلية الفكرة للتطبيق والتكرار. وقد تسمح هذه الأنظمة مستقبلاً بإجراء عمليات تفتيش متكررة بتكلفة أقل، مع تقليل الاعتماد على السفن، والحد من تعريض العاملين للمخاطر في البحر، إلى جانب تسريع اكتشاف الأعطال أو الأضرار التي قد تصيب خطوط الأنابيب والكابلات والمنشآت تحت الماء.