لطالما اعتمدت تقنيات الإمساك الروبوتي على أصابع صلبة أو مشابك ميكانيكية أو أنظمة شفط، وهي حلول أثبتت فاعليتها في البيئات الصناعية المنضبطة، لكنها تواجه صعوبات واضحة عند التعامل مع أجسام غير منتظمة الشكل أو حساسة أو تجمع بين الهشاشة والوزن. غير أن مشروعاً بحثياً جديداً من معهد ماساتشوستس للتقنية (MIT)، بالتعاون مع جامعة ستانفورد، يقدّم مقاربة مختلفة جذرياً، مستلهمة من الطريقة التي تلتف بها النباتات المتسلقة وتتكيف مع محيطها.
طريقة عمل الروبوت
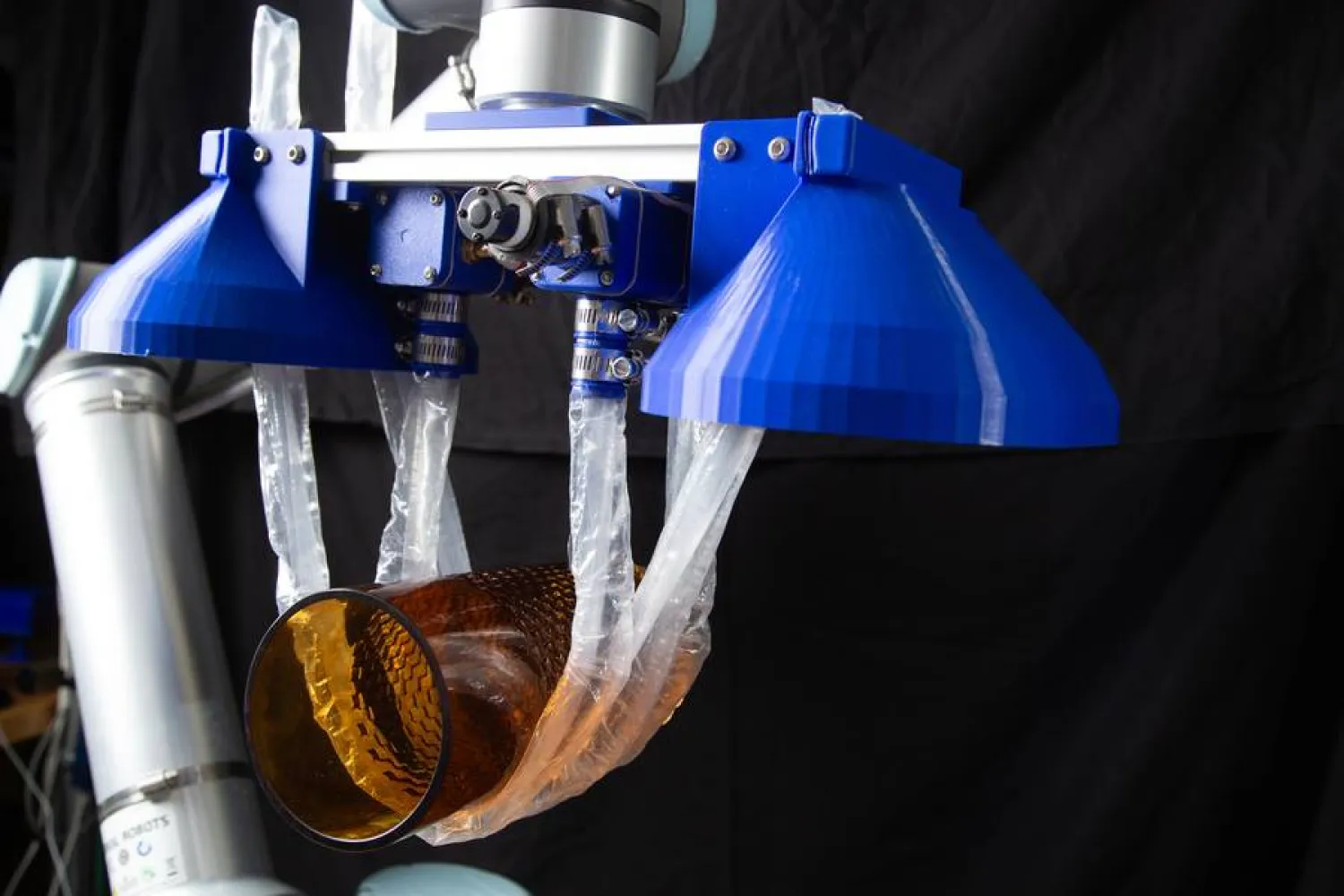
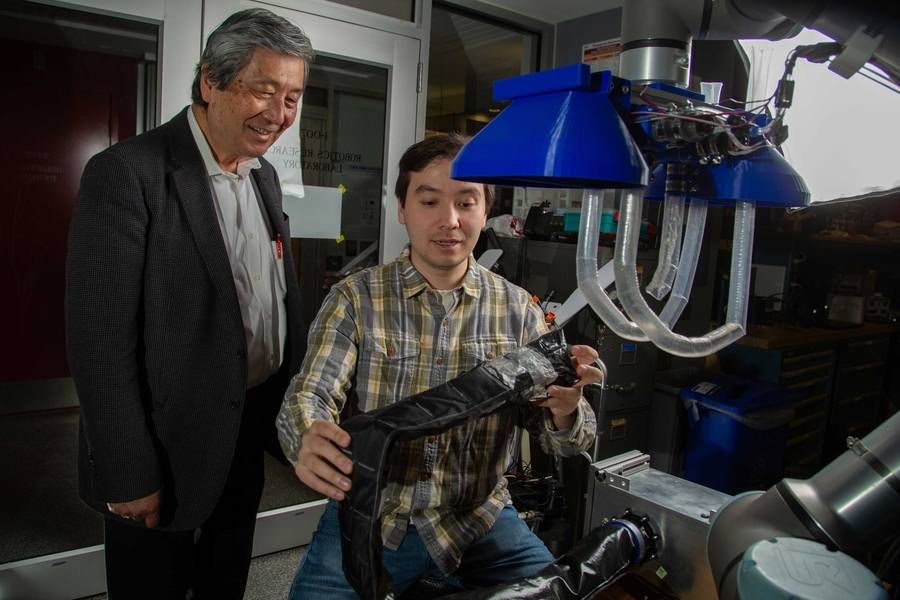
بدل الضغط أو القبض المباشر على الأجسام، يعتمد النظام الجديد على أنابيب طويلة ومرنة قابلة للنفخ، تمتد من قاعدة صغيرة باتجاه الهدف، في حركة تشبه نمو النباتات المتسلقة بحثاً عن دعامة. وعند ملامسة الجسم، تلتف هذه الأنابيب حوله ثم تنكمش تدريجياً، لتشكّل ما يشبه الحمالة الناعمة التي توزّع الوزن بشكل متوازن.
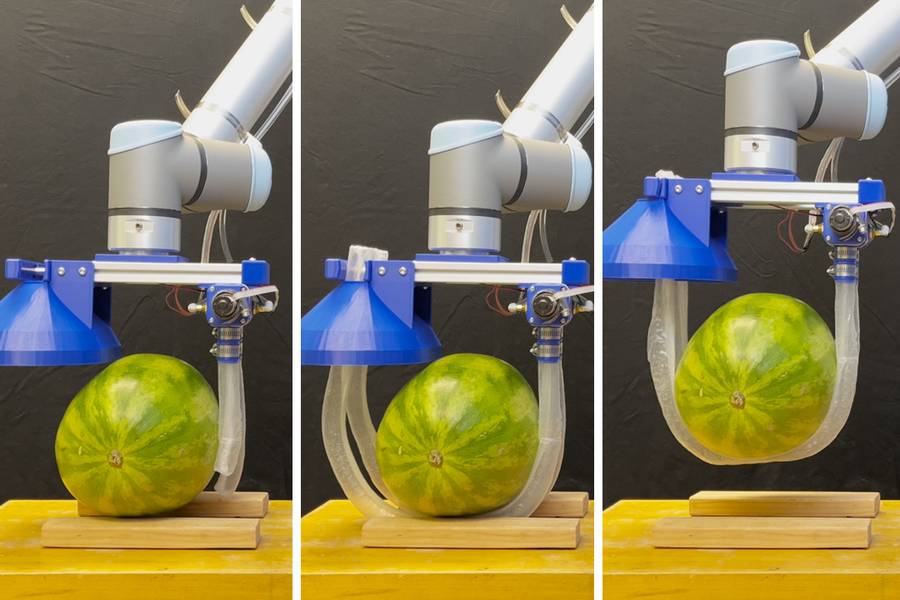
ويمنح هذا التصميم الروبوت قدرة غير مألوفة على رفع أجسام تجمع بين الوزن والهشاشة في آن واحد. ففي التجارب المخبرية، تمكنت القبضة من التعامل مع أوعية زجاجية ومنتجات زراعية حساسة دون إلحاق أي ضرر بها، مع الحفاظ في الوقت نفسه على قوة كافية لرفع أحمال أثقل بكثير. ويكمن سر هذه القدرة في توزيع الضغط على مساحة واسعة، بدل تركيزه في نقاط تماس محدودة قد تتسبب بالكسر أو التلف.
إحدى أبرز مزايا هذا النهج المستوحى من الطبيعة هي قدرته العالية على التكيّف. فالقبضات الروبوتية التقليدية غالباً ما تحتاج إلى معرفة مسبقة بشكل الجسم وموقعه الدقيق، فيما تستطيع الأنابيب المرنة في هذا النظام الالتفاف حول العوائق، والدخول إلى المساحات الضيقة، والتكيّف تلقائياً مع الأشكال المختلفة، ما يجعلها مناسبة لبيئات عمل غير متوقعة أو مزدحمة.
مجالات الاستخدام
يصنّف الباحثون هذا الابتكار ضمن تقاطع مجالين ناشئين هما الروبوتات اللينة، والروبوتات «النامية». إنها أنظمة لا تتحرك بالكامل داخل الفراغ، بل تمتد وتزداد طولاً للوصول إلى أهدافها. وبعد اكتمال الالتفاف حول الجسم، تُفعَّل آلية داخلية للتثبيت واللف، ما يسمح برفع الحمولة ونقلها بدرجة عالية من التحكم والاستقرار. ولا تقتصر الاستخدامات المحتملة لهذه التقنية على المختبرات. ففي البيئات الصناعية، يمكن أن تسهم في تحسين مناولة البضائع غير المنتظمة أو سريعة التلف داخل المستودعات وخطوط الإنتاج. وفي القطاع الزراعي، قد تفتح الباب أمام حصاد أكثر لطفاً للفواكه والخضراوات الحساسة. كما يشير الباحثون إلى تطبيقات مستقبلية في مجال الرعاية الصحية، حيث يمكن لنُسخ أكبر من هذا النظام أن تساعد مقدمي الرعاية في رفع المرضى أو دعمهم جسدياً، ما يقلل من الإصابات والإجهاد البدني.
آفاق التطور التقني
يعكس هذا البحث توجهاً أوسع في عالم الروبوتات نحو تصميم أنظمة قادرة على التفاعل الآمن مع البشر وبيئات العمل غير المتوقعة. فمع انتقال الروبوتات تدريجياً من المساحات المعزولة إلى أماكن مشتركة مع البشر، تصبح السلامة والمرونة عاملين لا يقلان أهمية عن القوة أو السرعة.
ومن خلال استلهام مبدأ بسيط من الطبيعة وتحويله إلى حل هندسي عملي، يقدّم هذا الابتكار مثالاً واضحاً على كيف يمكن للتصميم المستوحى من الكائنات الحية أن يوسّع حدود ما تستطيع الروبوتات القيام به. وبدل إجبار العالم على التكيّف مع آلات صلبة، يطرح هذا النهج مستقبلاً تتكيّف فيه الآلات مع العالم من حولها.