تمكن علماء فلك من اكتشاف كارثة قديمة حلت بالكرة الأرضية، تعود إلى أكثر من نصف مليار عام، وهو ما من شأنه أن يعيد رسم تاريخ الكون وتطور الحياة على كوكب الأرض، ويشكل أهمية كبيرة في مجال تحديد مسار البشرية.
وقال تقرير نشرته صحيفة «ميترو» البريطانية إن تلسكوب «جيمس ويب» التابع لـ«وكالة الفضاء الأميركية (ناسا)» رصد كارثة لا تُصدق؛ عمرها نصف مليار عام.
ووفق التفاصيل التي كشف عنها العلماء الأميركيون، فقد تمكنوا بفضل هذا الاكتشاف من تكوين نظرة ثاقبة أخرى لتاريخ الكون، وأشاروا إلى أن هذه الكارثة التي اكتشفت هي «تصادم كوني بين مجرتين حدث قبل نصف مليار سنة».
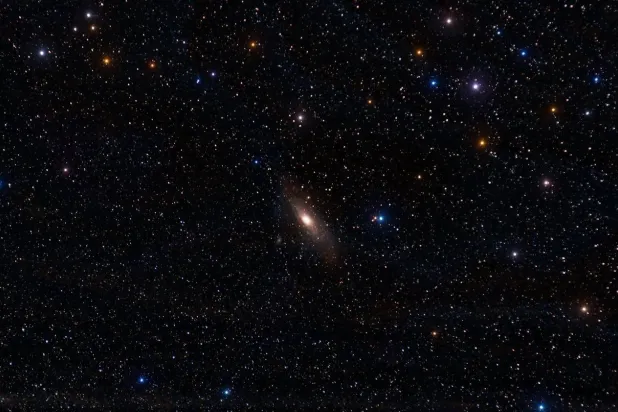
وتُظهر الصورة الملتقطة بواسطة التلسكوب دوامة متوهجة من اللونين الأحمر والبرتقالي، تتخللها النجوم اللامعة، وذلك على بعد 120 مليون سنة ضوئية، ومع ذلك، فإن شيئاً ما في كتلة النجوم والغبار يدل على ماضيها، ويؤكد حقيقة أنها كانت ذات يوم ليست مجرة واحدة؛ بل مجرتان.
ويقول العلماء إنه عند اصطدام المجرات تقوم بتوجيه الغاز والغبار اللازمين معاً لتشكيل نجوم جديدة، ويمكن رؤية ذلك في المناطق الأكثر إشراقاً؛ إذ تطلق النجوم الفتية ضوء الأشعة تحت الحمراء الذي يشع حبيبات صغيرة من الغبار، مما يمنح المجرة توهجها المميز الذي التقطه التلسكوب.
وقال الفريق البحثي: «أدى الاصطدام المجري الذي تسبب في تكوين (NGC 3256) إلى انفجار مضيء لتشكيل النجوم يمكن رؤيته في ألمع الأجزاء من الصورة».
وأضاف: «تتألق هذه النجوم الصغيرة بشكل أكثر سطوعاً عند أطول موجات الأشعة تحت الحمراء، والضوء الذي يمكن أن يخترق عبر الغبار المعتم في المجرة، ومع ذلك تارةً تكون النجوم القديمة آمنة عندما تصطدم المجرات، وذلك بفضل المسافات الكبيرة بينها؛ إذ إن أقرب نجم إلينا بعد الشمس هو (بروكسيما سنتوري)، ويبعد نحو 25 تريليون ميل».
وقال الفريق: «إذا طُلب منك تصوير اصطدام مجرة، فقد تتخيل النجوم تتمايل بعضها مع بعض بنتائج كارثية». وتابع: «في الواقع، المساحات بين النجوم في المجرة شاسعة، وعندما تصطدم المجرات، تمر غيوم نجومها بعضها عبر بعض وتختلط مثل سحابتين من الدخان».
ويقول العلماء إن هذه النتائج التي توصلوا إليها يمكن أن تعلمهم المزيد عن تكوين مجرتنا.
وفي يناير (كانون الثاني) الماضي، رصد تلسكوب «جيمس ويب» أول كوكب غريب، حيث أظهرت صوره الأولى، التي كُشف عنها لاحقاً، الكون قبل 13 مليار سنة.