يد روبوتية بقدرات تتجاوز اليد البشريةhttps://aawsat.com/%D9%8A%D9%88%D9%85%D9%8A%D8%A7%D8%AA-%D8%A7%D9%84%D8%B4%D8%B1%D9%82/5232955-%D9%8A%D8%AF-%D8%B1%D9%88%D8%A8%D9%88%D8%AA%D9%8A%D8%A9-%D8%A8%D9%82%D8%AF%D8%B1%D8%A7%D8%AA-%D8%AA%D8%AA%D8%AC%D8%A7%D9%88%D8%B2-%D8%A7%D9%84%D9%8A%D8%AF-%D8%A7%D9%84%D8%A8%D8%B4%D8%B1%D9%8A%D8%A9
تصميم مُبتَكر يتيح الإمساك بأشياء عدّة والزحف المستقلّ
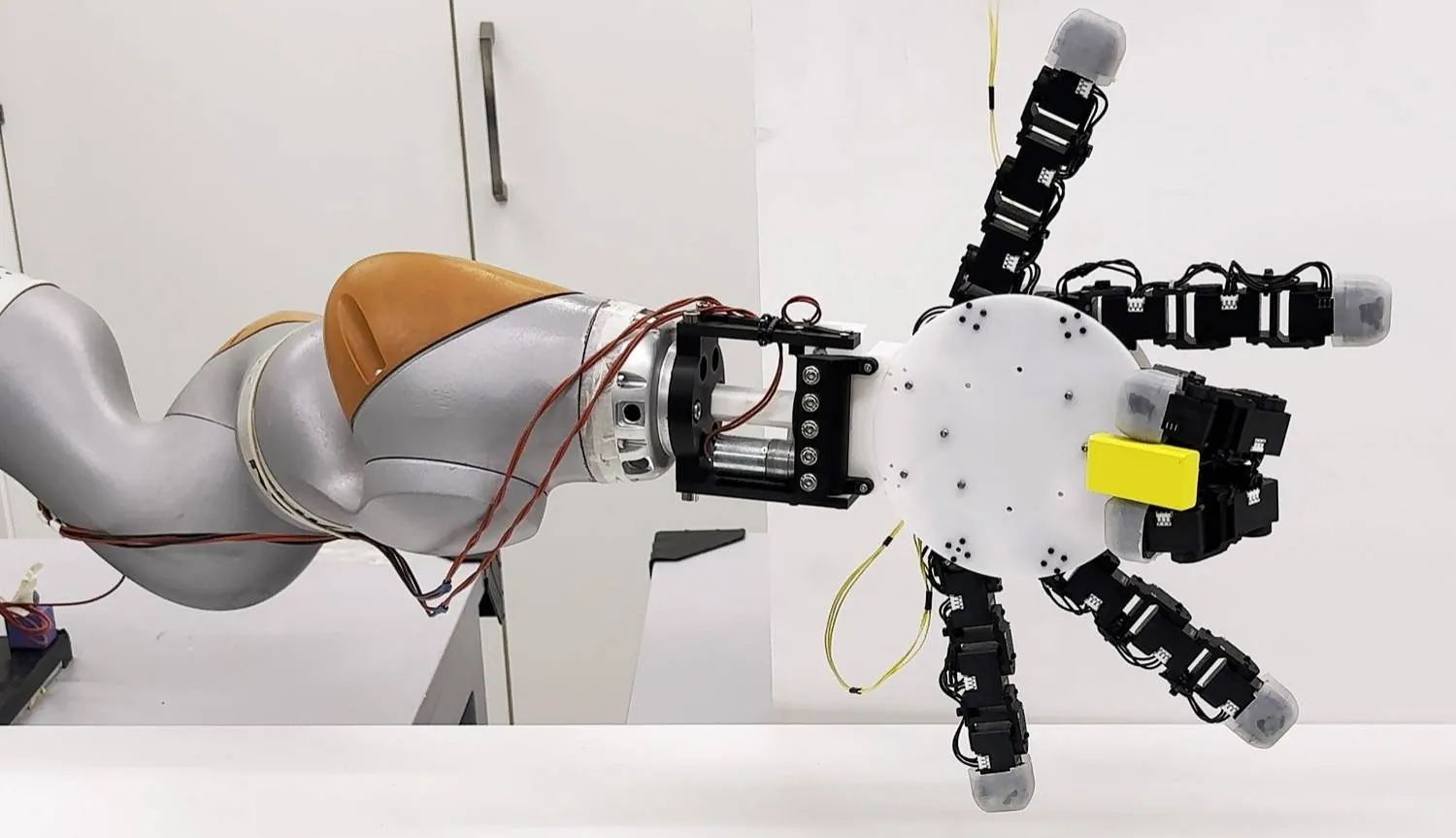
تصميم يد قابلة للفصل تمنح الروبوتات مرونة استثنائية (المعهد الفيدرالي السويسري للتكنولوجيا)
القاهرة :«الشرق الأوسط»
TT
القاهرة :«الشرق الأوسط»
TT
يد روبوتية بقدرات تتجاوز اليد البشرية
تصميم يد قابلة للفصل تمنح الروبوتات مرونة استثنائية (المعهد الفيدرالي السويسري للتكنولوجيا)
طوَّر فريق بحثي في المعهد الفيدرالي السويسري للتكنولوجيا في لوزان يداً روبوتية مبتكرة تتجاوز قدرات اليد البشرية التقليدية، من خلال تصميم ثوري يجمع بين التعدّد الوظيفي والمرونة الحركية.
وأوضح الباحثون أنّ اليد يمكن استخدامها للوصول إلى الأشياء في أماكن ضيّقة أو غير متاحة للذراع الروبوتية التقليدية، كما تتيح تنفيذ مَهمّات متعدّدة في الوقت عينه بكفاءة أكبر. ونُشرت النتائج، الخميس، في دورية علمية متخصّصة.
وتُعد اليد البشرية نموذجاً مثالياً للمهارة الحركية بفضل الإبهام والمفاصل المتعددة، وإنما تصميمها يظل محدوداً بسبب الإبهام الأحادي غير المتماثل، والارتباط بذراع ذات حركة محدودة.
وللتغلُّب على هذه القيود، صمَّم الفريق يداً روبوتية يمكنها دعم ما يصل إلى 6 أصابع متطابقة، وتتيح لأي تركيبة من الأصابع تكوين أزواج متقابلة تشبه الإبهام. كما أنّ التصميم القابل للعكس يجعل ظهر اليد وكفّها قابلين للتبديل، ويمكّن اليد من الانفصال عن الذراع الروبوتية والزحف بطريقة تشبه العنكبوت للوصول إلى الأشياء خارج نطاق الذراع.
وأشار الباحثون إلى أنّ تصميم اليد استُلهم من الطبيعة؛ إذ طوَّر عدد من الكائنات أطرافاً متعدّدة الوظائف تجمع بين الإمساك والتنقّل. فعلى سبيل المثال، يستخدم الأخطبوط أذرعه المرنة للزحف وفتح الأصداف، في حين تستعين بعض الحشرات، مثل الدبابير، بأطراف متخصّصة للصيد والحركة.
ووفق الباحثين، يمكّن هذا التصميم المبتكر اليد من أداء القبضات المعقّدة والإمساك بأشياء عدّة في وقت واحد، كما يمكن دعم أكثر من 6 أصابع عند الحاجة لتوسيع قدراتها.
كما تتمتَّع اليد أيضاً بالقدرة على الانفصال عن الذراع والزحف بشكل مستقلّ، مع الحفاظ على الإمساك بالأشياء سواء تحت الكف أو على ظهر اليد أو كليهما، ممّا يتيح دمج الحركة مع الإمساك المتزامن بكفاءة عالية.
وعن مَهمّاتها العملية، يشير الباحثون إلى أنه يمكن لليد أداء معظم القبضات البشرية التقليدية باستخدام 5 أصابع، أما عند إضافة أصابع إضافية، فتستطيع أداء مَهمّات تتطلّب عادة يدين بشريتَيْن، مثل فكّ غطاء زجاجة كبيرة أو استخدام مفكّ لتثبيت مسمار.
ويوفّر التصميم غير التقليدي مرونة فائقة، ويتيح التحكّم بمهمّات عدّة في وقت واحد من دون الحاجة إلى تحريك الذراع بالكامل.
وقال الباحثون: «لا يوجد حد فعلي لعدد الأشياء التي يمكنها الإمساك بها، فإذا احتجنا إلى زيادة القدرة، نضيف مزيداً من الأصابع».
ويتوقَّع الفريق أن يُستخدم هذا الابتكار في بيئات تتطلّب الصِّغر والمرونة والتفاعل متعدّد الأوضاع، مثل الوصول إلى الأشياء في المساحات الضيقة أو توسيع نطاق الذراع الصناعية التقليدية.
كما يمكن تعديل اليد لاستخدامها في الأطراف الاصطناعية؛ إذ توفّر الوظائف المتماثلة والقابلة للعكس مزايا للمستخدمين تتجاوز القدرات البشرية الطبيعية، في ظلّ قدرة الدماغ على التكيُّف مع أصابع روبوتية إضافية، ممّا يُمهّد الطريق لتطبيقات متقدّمة في بيئات متخصّصة.
ارتفعت التدفقات إلى صناديق الأسهم العالمية خلال الأسبوع المنتهي في الأول من يوليو (تموز)، مع استغلال المستثمرين تراجع الأسواق الرئيسية لإضافة أسهم التكنولوجيا.
يحذر باحثون من أن التفاعل المستمر مع الذكاء الاصطناعي قد يعيد تشكيل العلاقات البشرية ويزيد العزلة والاعتماد العاطفي مع الوقت.
نسيم رمضان (لندن)
فان سيسوكو: «تماسكي» يحوّل الصراعات الداخلية إلى تعبيرات ملموسةhttps://aawsat.com/%D9%8A%D9%88%D9%85%D9%8A%D8%A7%D8%AA-%D8%A7%D9%84%D8%B4%D8%B1%D9%82/5292086-%D9%81%D8%A7%D9%86-%D8%B3%D9%8A%D8%B3%D9%88%D9%83%D9%88-%D8%AA%D9%85%D8%A7%D8%B3%D9%83%D9%8A-%D9%8A%D8%AD%D9%88%D9%91%D9%84-%D8%A7%D9%84%D8%B5%D8%B1%D8%A7%D8%B9%D8%A7%D8%AA-%D8%A7%D9%84%D8%AF%D8%A7%D8%AE%D9%84%D9%8A%D8%A9-%D8%A5%D9%84%D9%89-%D8%AA%D8%B9%D8%A8%D9%8A%D8%B1%D8%A7%D8%AA-%D9%85%D9%84%D9%85%D9%88%D8%B3%D8%A9
فان سيسوكو: «تماسكي» يحوّل الصراعات الداخلية إلى تعبيرات ملموسة
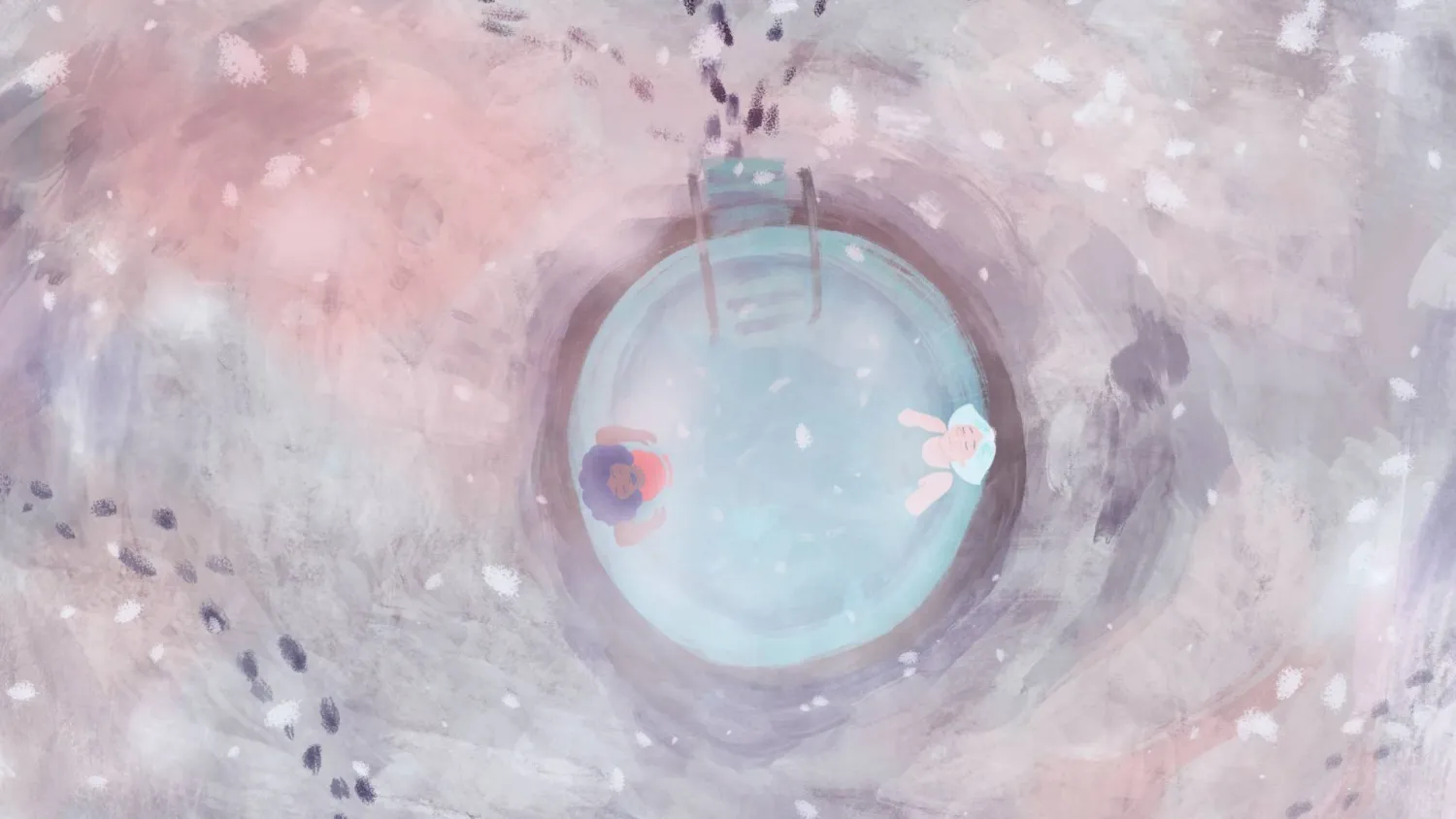
عرض الفيلم في مهرجان «آنسي» مؤخراً بفرنسا (الشركة المنتجة)
أكدت المخرجة الفرنسية-المالية، فان سيسوكو، أن فيلم الرسوم المتحركة القصيرة «تماسكي» (Sundruð – Hold It Together) انطلق من رغبتها في التعبير عن المشاعر التي تعجز الكلمات عن وصفها، لافتة إلى أن اللجوء للواقعية السحرية جاء وسيلة تمنحها القدرة على تجسيد الصراعات الداخلية وتحويلها إلى صور بصرية ملموسة، ليقترب الفيلم من الجمهور عبر لغة إنسانية تتجاوز الحدود والثقافات.
وأضافت فان سيسوكو، في حوار مع «الشرق الأوسط» عبر «زووم»، أن الرسوم المتحركة منحتها مساحة واسعة لاستكشاف مشاعر الانتماء والاغتراب بطريقة لا تستطيع السينما التقليدية تحقيقها، موضحة أنها تحرص دائماً في أعمالها على طمس الحدود بين الواقع والخيال، لأن الإنسان يعيش كثيراً من مشاعره بصورة يصعب التعبير عنها بالكلمات، في حين تستطيع الصورة والرمز أن يختزلا هذه الأحاسيس في لحظات بصرية مؤثرة.
وشارك فيلم «تماسكي» (Sundruð – Hold It Together) في الدورة الماضية من «مهرجان آنسي الدولي لأفلام الرسوم المتحركة»، حيث نال جائزة «أندريه مارتن»، إحدى الجوائز المهمة المخصصة للأعمال المتميزة في مجال الرسوم المتحركة، ويروي الفيلم قصة «نيما»، وهي امرأة تحاول التأقلم مع مجتمع جديد، لكنها تجد نفسها عالقة بين الشعور بالانتماء والرغبة في الهروب، لتتحول رحلتها النفسية إلى سلسلة من التحولات السريالية التي تعكس صراعها الداخلي مع الهوية والعزلة والبحث عن مكان يمكن أن تسميه وطناً.
المخرجة السينمائية فان سيسوكو (الشركة المنتجة)
وأوضحت سيسوكو أنها تنجذب بطبيعتها إلى أسلوب الواقعية السحرية، لأنه يمنحها فرصة لاستكشاف العالم الداخلي للشخصيات بصورة أكثر صدقاً، لافتة إلى أنها تحب تحويل المشاعر غير المرئية إلى عناصر مادية داخل الصورة، بحيث يصبح الخوف أو الوحدة أو القلق جزءاً من العالم الذي يراه المشاهد، وليس مجرد إحساس يُروى بالحوار.
عدم الانتماء
ولفتت إلى أن الإحساس بعدم الانتماء الذي تعيشه بطلة الفيلم ويبدو مرتبطاً بالهجرة في ظاهرها، لكنه في الحقيقة شعور إنساني يمكن أن يمر به أي شخص، مؤكدة أن أكثر ما أسعدها بعد العروض الأولى للفيلم هو اكتشاف أن الجمهور تفاعل مع هذه الفكرة، إذ أخبرها عدد من المشاهدين بأنهم وجدوا أنفسهم داخل شخصية «نيما» رغم أنهم لم يعيشوا تجربة الهجرة.
وأضافت أن شخصية «سفانا» تبدو في البداية مختلفة تماماً عن البطلة؛ فهي منفتحة وواثقة وتتصرف وكأنها تملك المكان، إلا أن تطور الأحداث يكشف عن أنها بدورها تعاني شعوراً عميقاً بالوحدة، لافتة إلى أن الفيلم يحاول أن يبرهن في نهايته على أن العزلة قد تتحول إلى مساحة مشتركة تجمع البشر بدلاً من أن تفصل بينهم.
وأشارت إلى أن التحولات الجسدية التي تمر بها البطلة طوال الأحداث لم تكن مجرد حلول بصرية أو مؤثرات خيالية، وإنما جاءت بوصفها امتداداً مباشراً لحالتها النفسية، موضحة أنها تؤمن بأن المشاعر تترك أثراً حقيقياً في الجسد، وأن اللغة كثيراً ما تعجز عن احتواء التعقيدات العاطفية، ولذلك تلجأ إلى الاستعارة البصرية بوصفها اللغة الأقرب إلى التعبير عن تلك الحالات.
وتطرقت إلى تأثير تجربتها الشخصية على الفيلم، مؤكدة أن العمل يحمل جزءاً من حياتها بصفتها امرأة تنتمي إلى أكثر من ثقافة، لكنها لا تعدّه سيرة ذاتية، لافتة إلى أن إقامتها في آيسلندا خلال فترة كتابة السيناريو كانت صاحبة التأثير الأكبر على ملامح العمل؛ إذ استلهمت تفاصيل الحياة اليومية هناك، بداية من العادات الاجتماعية داخل حمامات السباحة الحرارية، مروراً بطريقة التواصل بين الناس، وصولاً إلى الطقس وطبيعة العلاقات الإنسانية في المجتمع الآيسلندي.
تعاون إنتاجي
وأكدت أن التعاون الإنتاجي بين آيسلندا وفرنسا وبلجيكا منح الفيلم ثراءً استثنائياً، موضحة أن كل دولة أضافت عنصراً مختلفاً إلى المشروع، فقد جرت مرحلة التطوير والتأليف الموسيقي في آيسلندا، في حين نُفذت الرسوم المتحركة في فرنسا، واستُكملت عمليات ما بعد الإنتاج في بلجيكا، وهو ما أتاح لها الاستفادة من خبرات متعددة، كما أن عملها مع فنانين لم يعيشوا في آيسلندا دفعها إلى إعادة التفكير في كثير من التفاصيل التي بدت بالنسبة إليها بديهية، وساعدها في إبراز الجوانب الأكثر أهمية بالنسبة للمشاهد.
قدّمت المخرجة تجربتها الثانية في مجال الرسوم المتحركة (الشركة المنتجة)
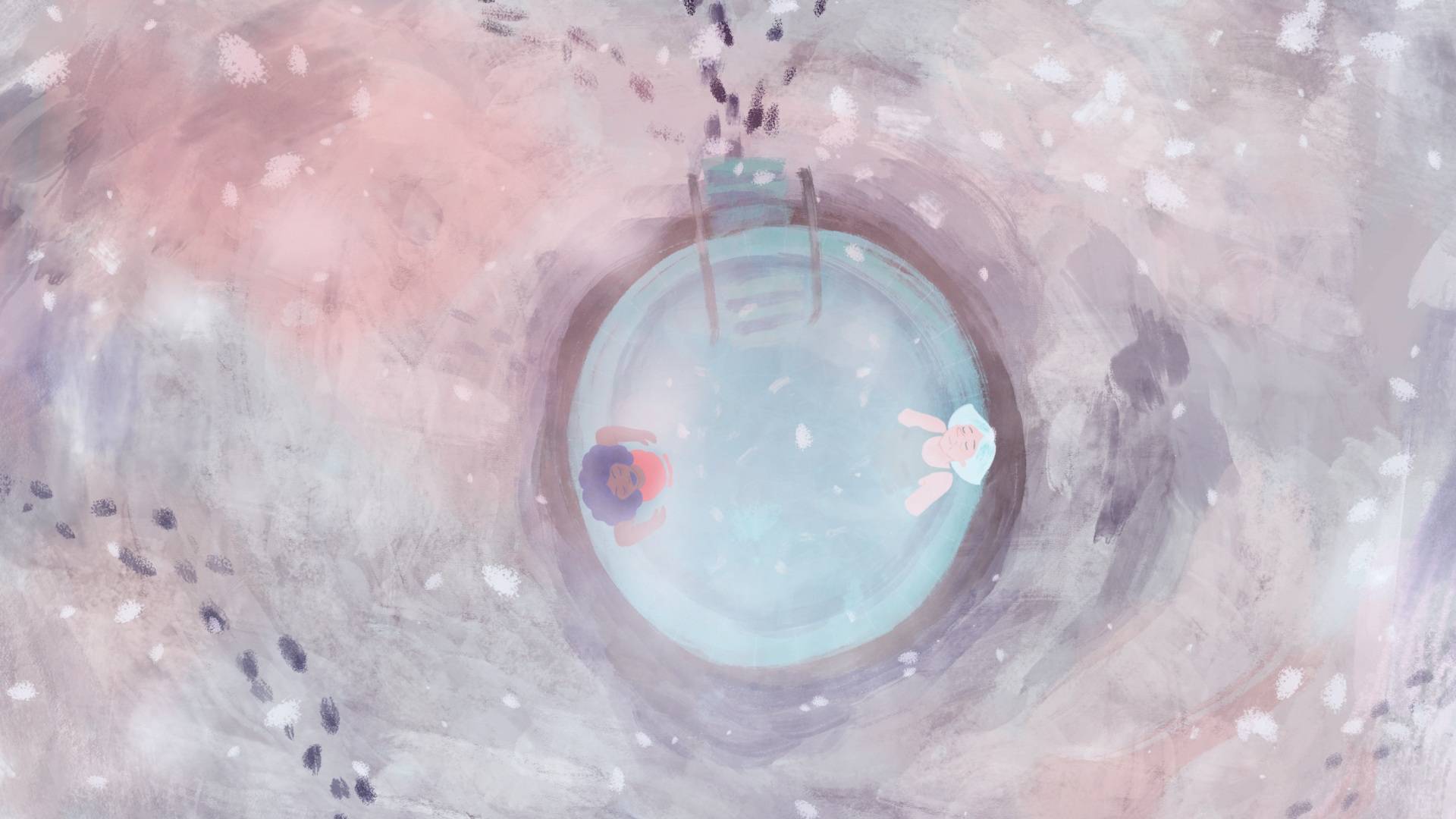
وأكدت سيسوكو أن الفيلم يعتمد على تحولات رمزية يصعب تقديمها بالقدر نفسه من الحرية في السينما الحية، في حين تتيح الرسوم المتحركة للمخرج أن يتجاوز قوانين الواقع والفيزياء، ليحول الخيال إلى جزء طبيعي من السرد، لافتة إلى أن حمامات السباحة الحرارية تحتل مكانة خاصة في الثقافة الآيسلندية، ولذلك اختارتها لتكون المسرح الرئيسي للأحداث، بوصفها نموذجاً مصغراً للمجتمع بكل ما يحمله من علاقات وقواعد غير مكتوبة.
وأضافت المخرجة أن الماء نفسه يحمل بالنسبة إليها دلالات إنسانية عميقة، فهو يرمز إلى التحول والزمن والتغير المستمر، كما يمتلك طبيعة مزدوجة؛ إذ يمكن أن يكون مخيفاً وعنيفاً في لحظة، ثم يتحول إلى مصدر للسكينة والشفاء في لحظة أخرى، وهو ما يمنحه قدرة كبيرة على التعبير البصري داخل السينما.
جُمل مبتورة
وأشارت إلى أن غياب اللغة المشتركة بين شخصيات الفيلم لم يكن مجرد تفصيل درامي، وإنما عنصر أساسي في بنائه، لذلك تعمّدت استخدام الجمل المبتورة وسوء الفهم واللحظات الصامتة، لأنها تعكس بدقة شعور الإنسان عندما يجد نفسه داخل مجتمع لا يتقن لغته أو لا يفهم قواعده.
وأكدت أن أكثر ما أثر فيها بعد العرض العالمي الأول في مهرجان «آنسي» لم يكن التصفيق أو الإشادات النقدية، وإنما اللقاءات التي جمعتها بالمشاهدين بعد انتهاء العروض؛ إذ فُوجئت بأن كثيرين تحدثوا إليها عن شعورهم الشخصي بالغربة، وهو ما عدّته دليلاً على أن الفيلم تجاوز خصوصية المكان ليصل إلى تجربة إنسانية مشتركة.
عرض الفيلم في مهرجان «آنسي» مؤخراً بفرنسا (الشركة المنتجة)
وعن فوز الفيلم بجائزة «أندريه مارتن»، قالت إن هذا التتويج جاء مفاجئاً بالنسبة إليها، خصوصاً أنها لا تمتلك خلفية أكاديمية في مجال الرسوم المتحركة، وأن «تماسكي» هو ثاني أفلامها فقط في هذا المجال، مشيرة إلى أنها أنجزت العمل في أوقات كانت توفّق فيها بين مسؤولياتها الأسرية ووظيفتها اليومية، لذلك يمثّل هذا التقدير بالنسبة إليها حافزاً كبيراً للاستمرار، كما تأمل أن يمنح الفيلم حضوراً أوسع داخل آيسلندا، خصوصاً في ظل تصاعد النقاشات المتعلقة بالهجرة.
عريس مصري يُعلّق حفل زفافه لمتابعة ركلات ترجيح «الفراعنة» والـ«سوكيروز»
مصريون يرفعون سقف توقعاتهم للمباراة المقبلة أمام الأرجنتين (د.ب.أ)
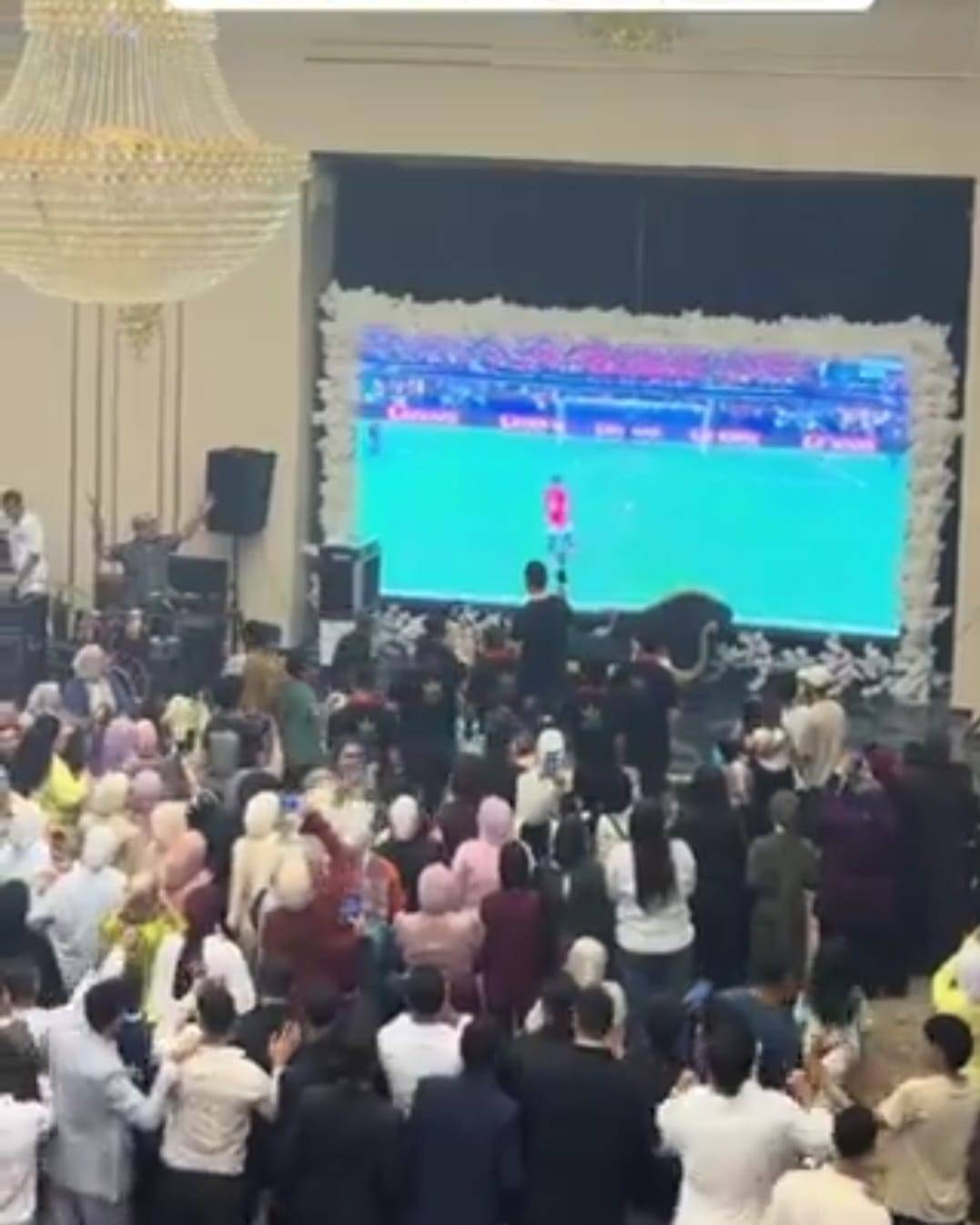
تحوّل حفل زفاف مصري، مساء السبت، إلى ما يُشبه مدرجاً للمشجعين، بعدما توقفت مراسم الاحتفال داخل قاعة الأفراح، واجتمع «المعازيم» أمام شاشة عملاقة لمتابعة ركلات الترجيح بين المنتخب المصري ونظيره الأسترالي، قبل أن تنفجر القاعة بالتصفيق والهتافات مع الركلة الحاسمة التي منحت «الفراعنة» بطاقة التأهل إلى دور الـ16.
وأظهر الفيديو المتداول للزفاف اشتعال أجواء الفرح على وقع أغنية «والله وعملوها الرجالة»، فيما أطلق مُشغل الأسطوانات (الدي جي) تعليقات على غرار «وشك حلو يا عريس»، في إشارة إلى «الفأل الطيب» الذي صاحب ليلة الزفاف والانتصار الكروي التاريخي معاً.
وفي موازاة ضجيج مدرجات كأس العالم في دالاس الأميركية، كانت مصر تعيش احتفالاً موازياً امتد من المقاهي إلى البيوت، ومن الشوارع والميادين إلى القرى، لتتعالى الهتافات والزغاريد والألعاب النارية مع الركلة الأخيرة التي منحت «الفراعنة» إنجازاً تاريخياً.
جانب من قاعة حفل الزفاف خلال متابعة ركلات الترجيح (إكس)
ويرى الكاتب والناقد الرياضي محمد البرمي أن «ما عاشه المصريون لم يكن مجرد احتفال بفوز كروي، بل ليلة تاريخية بكل ما تحمله الكلمة من معنى، إذ إنها المرة الأولى التي يشهدون فيها تأهل منتخبهم إلى دور الـ16 في كأس العالم، كما أن الشعب المصري يمتلك قدرة خاصة على صناعة الفرح حتى في أصعب الظروف، إذ يعرف كيف يحول اللحظات الجماعية إلى احتفالات عفوية تمتد إلى كل مكان»، كما يقول لـ«الشرق الأوسط».
وأضاف أن «كثيرين حرصوا على توثيق تلك اللحظة؛ لأنها ستظل حاضرة في الذاكرة الجماعية، ففي فيديو الزفاف، كل من كان حاضراً، وفي مقدمتهم العريس والعروس، سيظلون يتذكرون أنهم احتفلوا بزفافهم في الليلة التي تأهل فيها منتخب مصر إلى دور الـ16 لأول مرة، وسيحكون ذلك لأبنائهم وللأجيال المقبلة».
مصريون يحتفلون بالفوز على أستراليا (د.ب.أ)
وتعدّ الدكتورة سارة الألفي، أستاذة علم الاجتماع، أن «كرة القدم تحوّلت خلال السنوات الأخيرة من مجرد لعبة تحظى باهتمام قطاع من الرجال إلى طقس اجتماعي جامع، بعدما اتسعت دائرة متابعتها لتشمل السيدات والأطفال والعائلات»، وأضافت: «اليوم أصبح من المعتاد أن نجد الأسر تلتف حول الشاشات في المنازل والمقاهي والنوادي الرياضية لمتابعة مباريات كأس العالم»، كما تقول لـ«الشرق الأوسط».
وترى سارة الألفي أن ما جرى خلال حفل الزفاف لم يكن سلوكاً استثنائياً، بقدر ما كان «امتداداً طبيعياً لهذا التحول؛ فـ(المعازيم)، وكذلك العريس والعروس، كانوا يدركون أهمية المباراة، لا سيما مع نهايتها الدرامية بركلات الترجيح. وهذه المشاهد، وإن بدت جديدة في المجتمع المصري، فإنها تعكس اتساع الحضور الاجتماعي لكرة القدم، وقدرتها على جمع فئات مختلفة حول لحظة واحدة». وعدّت أن «هذه الظاهرة تستحق الدراسة والمتابعة، بوصفها أحد التحولات في أنماط التفاعل الاجتماعي والاحتفال الجماعي في مصر».
المصريون عاشوا ليلة صاخبة احتفالاً بالصعود إلى ثمن نهائي كأس العالم (د.ب.أ)
ويشير الناقد الرياضي محمد البرمي إلى أن «المصريين ينتظرون بشغف كبير المواجهة المرتقبة أمام الأرجنتين بمعنويات مرتفعة بعد الفوز على أستراليا، وبقدر أكبر من الطموح بعد الأداء اللافت الذي قدمه منتخب الرأس الأخضر أمام الأرجنتين».
وأضاف أن «تلك المباراة أظهرت أن مواجهة المنتخب الأرجنتيني، رغم صعوبتها، تظل قابلةً للمنافسة، فما قدمه منتخب الرأس الأخضر عزز طموح المنتخب المصري وجماهيره، وأياً كانت نتيجة المباراة المقبلة، فإن ما حققته مصر يُمثل تاريخاً عظيماً يمكن البناء عليه».
كما انتشرت العديد من المقاطع لحفلات زفاف أخرى استغلت الحدث التاريخي لمضاعفة البهجة داخل قاعات الزفاف وخارجها.
ومن المنتظر أن يلتقي المنتخب المصري نظيره الأرجنتيني، يوم 7 يوليو (تموز) المقبل، ضمن منافسات دور الـ16، وسط حالة من الترقب بين جماهيره، وآمال بمواصلة مشواره في المونديال.
«العلاوة يا ريس»... نداء مصري تقليدي عصف به التضخمhttps://aawsat.com/%D9%8A%D9%88%D9%85%D9%8A%D8%A7%D8%AA-%D8%A7%D9%84%D8%B4%D8%B1%D9%82/5292071-%D8%A7%D9%84%D8%B9%D9%84%D8%A7%D9%88%D8%A9-%D9%8A%D8%A7-%D8%B1%D9%8A%D8%B3-%D9%86%D8%AF%D8%A7%D8%A1-%D9%85%D8%B5%D8%B1%D9%8A-%D8%AA%D9%82%D9%84%D9%8A%D8%AF%D9%8A-%D8%B9%D8%B5%D9%81-%D8%A8%D9%87-%D8%A7%D9%84%D8%AA%D8%B6%D8%AE%D9%85
«العلاوة يا ريس»... نداء مصري تقليدي عصف به التضخم
التضخم يؤرق عدداً كبيراً من المصريين (الشرق الأوسط)
رغم رحيل الرئيس المصري الأسبق حسني مبارك عن الحياة منذ 6 سنوات، وعن السياسة منذ 15 عاماً، فإن النداء الشهير الذي كان يصيح به أحد المشاركين في احتفالات «عيد العمال» خلال حضور «الرئيس» في بداية شهر مايو (أيار) من كل عام «العلاوة يا ريس» بقي محفوراً في الذاكرة، وتحوّل مع مرور السنوات إلى تعبير شعبي يتردد كلما أُعلن عن زيادة جديدة في الأجور أو علاوة للعاملين بالدولة، وكأنها تختزل حكاية المصريين الطويلة مع الغلاء وتآكل الدخول.
لقطة نادرة للرئيس مبارك من خطابه بمناسبة عيد العمال في مركز مؤتمرات جامعة الأزهر بمدينة نصر وذلك في 30/4/2008 يدعو الحكومة بزيادة العلاوة من 15في المائة إلى 30في المائة حتى يتمكن الشعب من مواجهة زيادة الأسعار الناتجة عن الأزمة الاقتصادية.
وبعد سنوات من تلك «الصيحة» الشهيرة، عاد ملف العلاوات إلى الواجهة مجدداً، بعد إقرار مجلس النواب القانون الذي أصدره الرئيس المصري عبد الفتاح السيسي أخيراً، بشأن تحديد نسبة العلاوة الدورية للمخاطبين بقانون الخدمة المدنية، ومنح علاوة خاصة لغير المخاطبين بالقانون، وزيادة الحافز الإضافي للعاملين بالدولة، إلى جانب تقرير منحة خاصة للعاملين بشركات القطاع العام وقطاع الأعمال العام، في إطار حزمة تستهدف تحسين مستويات المعيشة والتخفيف من الأعباء الاقتصادية.
مصر رفعت الحد الأدنى للأجور في القطاع الحكومي إلى 8 آلاف جنيه (الشرق الأوسط)
ويتضمن القانون، الذي يبدأ تطبيقه بداية من الأول من يوليو (تموز) الحالي 2026، علاوة دورية بنسبة 12 في المائة من الأجر الوظيفي للمخاطبين بقانون الخدمة المدنية، بحد أدنى 150 جنيهاً شهرياً، (الدولار يساوي نحو 50 جنيهاً). وعلاوة خاصة بنسبة 15 في المائة من الأجر الأساسي لغير المخاطبين بالقانون، بالحد الأدنى نفسه». كما شملت الحزمة زيادة الحافز الإضافي لجميع العاملين بالدولة بقيمة مقطوعة تبلغ 750 جنيهاً شهرياً، إلى جانب منحة للعاملين بشركات القطاع العام وقطاع الأعمال العام، مع رفع إجمالي الدخل الشهري لمن يقل دخله عن 8 آلاف جنيه إلى هذا الحد.
وتأتي الزيادات الجديدة في وقت لا تزال فيه الأسر المصرية تواجه ضغوطاً معيشية نتيجة ارتفاع أسعار عدد من السلع والخدمات خلال السنوات الأخيرة. وتقول أمل عبد الحميد، معلمة بإحدى المدارس الحكومية بمحافظة الجيزة (غرب القاهرة) إن «العلاوة السنوية تمثل دعماً للعاملين، فأي زيادة بالدخل في النهاية خبر جيد لأي أسرة، لكنها لم تعد كافية لتعويض الارتفاع المتواصل في تكاليف المعيشة، وسرعان ما يختفي أثر هذه الزيادة» كما تقول لـ«الشرق الأوسط».
إحدى جلسات البرلمان المصري (البرلمان المصري)
ويرى الدكتور محمد فرج، الخبير الاقتصادي، «أن تحسين مستوى معيشة المواطنين لا يتحقق عبر العلاوات الدورية وحدها، وإنما يتطلب حزمة متكاملة من السياسات، في مقدمتها السيطرة على معدلات التضخم حتى لا تتآكل زيادات الأجور، إلى جانب ربط نمو الدخول بمعدلات ارتفاع الأسعار، وتعزيز الإنتاج والاستثمار بما يخلق فرص عمل، ويرفع مستويات الأجور بصورة مستدامة».
ويؤكد فرج في حديثه لـ«الشرق الأوسط» أن «العلاوات تمثل دعماً مرحلياً مهماً، لكنها لن تحقق أثراً ملموساً ما لم تتواكب مع إجراءات اقتصادية موازية تحافظ على القوة الشرائية على المدى الطويل أمام الزيادات المتلاحقة في أسعار السلع والخدمات».
وكانت مصر قد طبقت الحد الأدنى للأجور لأول مرة في يوليو 2011، عند 700 جنيه شهرياً، لكنه شهد زيادات متتالية مع تولي الرئيس عبد الفتاح السيسي رئاسة البلاد في عام 2014، ليصل إلى 7 آلاف جنيه في عام 2025، في إطار سياسة تستهدف تعزيز مستويات الدخول ومواكبة المتغيرات الاقتصادية، وذلك قبل أن يصل إلى 8 آلاف جنيه بداية من هذا الشهر.
مطالبات بالسيطرة على معدلات التضخم حتى لا تتآكل زيادات الأجور (الشرق الأوسط)
ويضيف الخبير الاقتصادي أن «أثر هذه الزيادات يرتبط بدرجة كبيرة بمسار التضخم خلال المرحلة المقبلة، فكلما استقرت الأسعار احتفظت الزيادة بقيمتها الشرائية مدة أطول، بينما يؤدي استمرار ارتفاع تكاليف المعيشة إلى تآكل أثرها تدريجياً، وهو ما يفسر استمرار الجدل السنوي حول مدى قدرة العلاوات على تحسين مستويات المعيشة، رغم الترحيب بها بوصفها دعماً مباشراً لدخول ملايين الموظفين».