كلنا نعرف «الأوريغامي»، وهو فن طي الأوراق الذي لطالما ارتبط بالثقافة اليابانية.
هذا الفن كان مصدر إلهام لباحثين في جامعة «EPFL» في مدينة لوزان السويسرية لابتكار روبوت قادر على تغيير شكله مثل حركة أوراق الـ«أوريغامي» وأيضاً التفاعل مع محيطه.
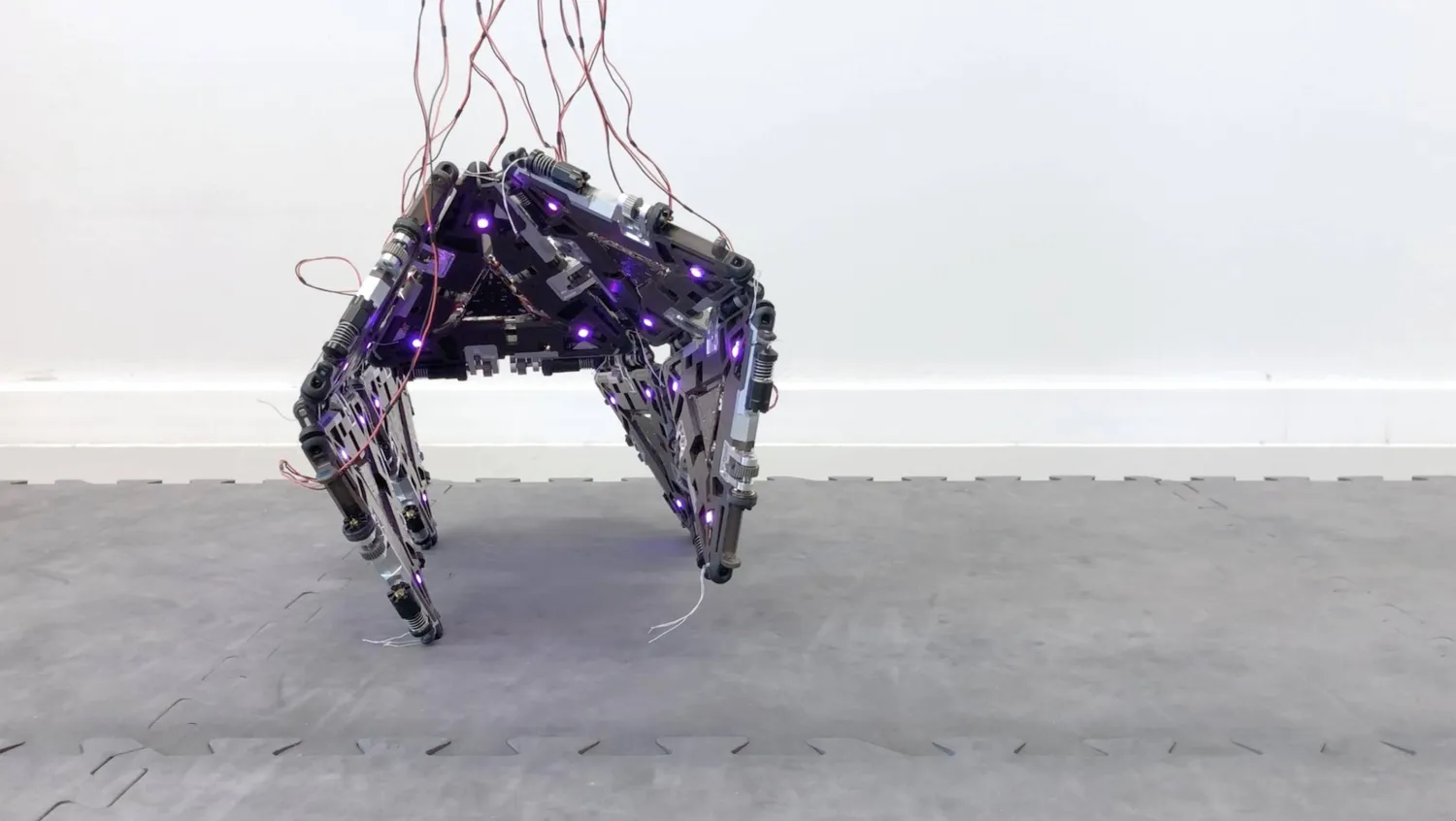
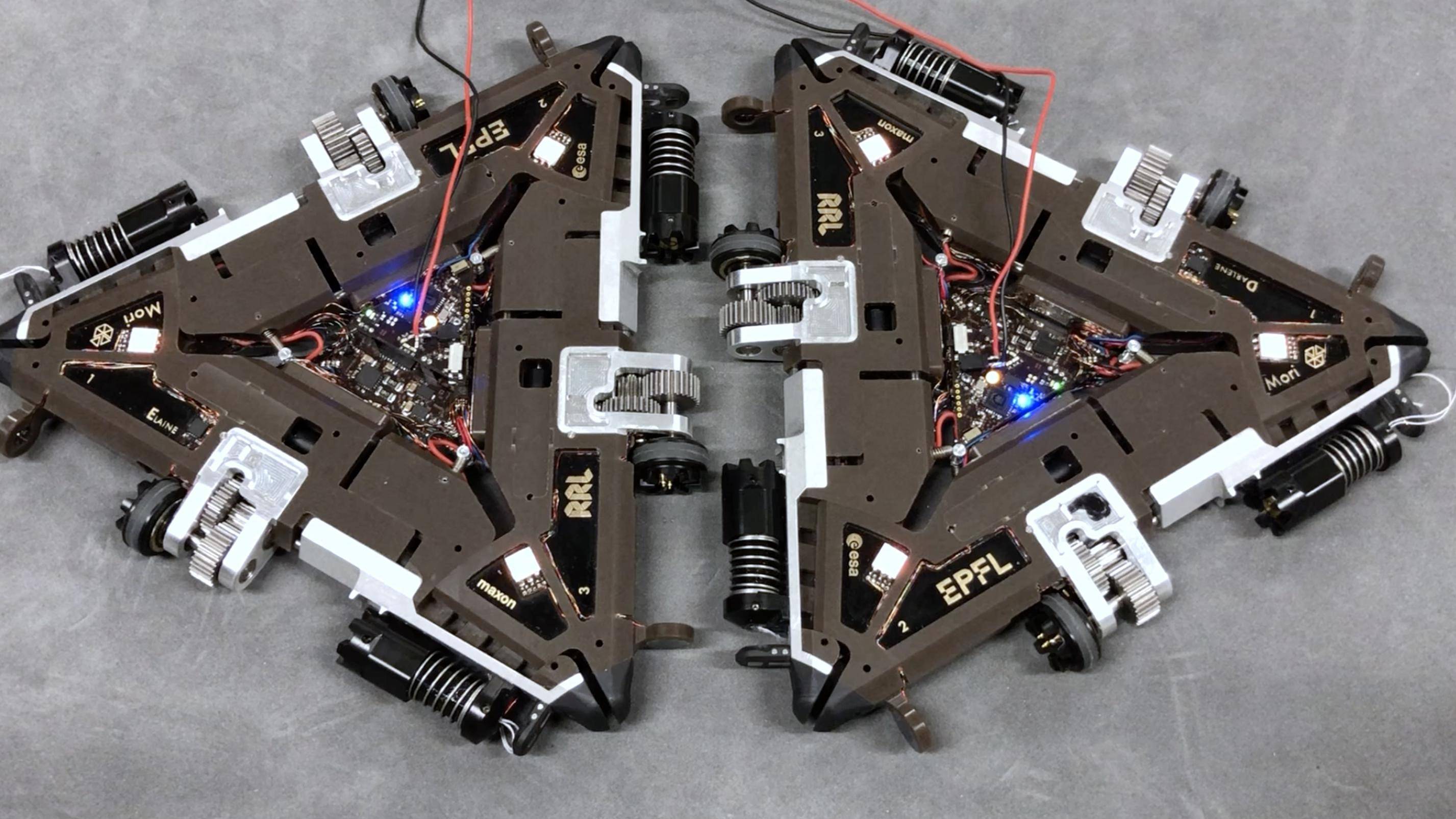
الروبوت الذي يدعى «موري 3» يمكن تجميعه وتفكيكه حسب الحاجة والبيئة والمهمة، كما تقول جايمي بايك، مديرة مختبر الروبوتات القابلة لإعادة التكوين في جامعة «EPFL».
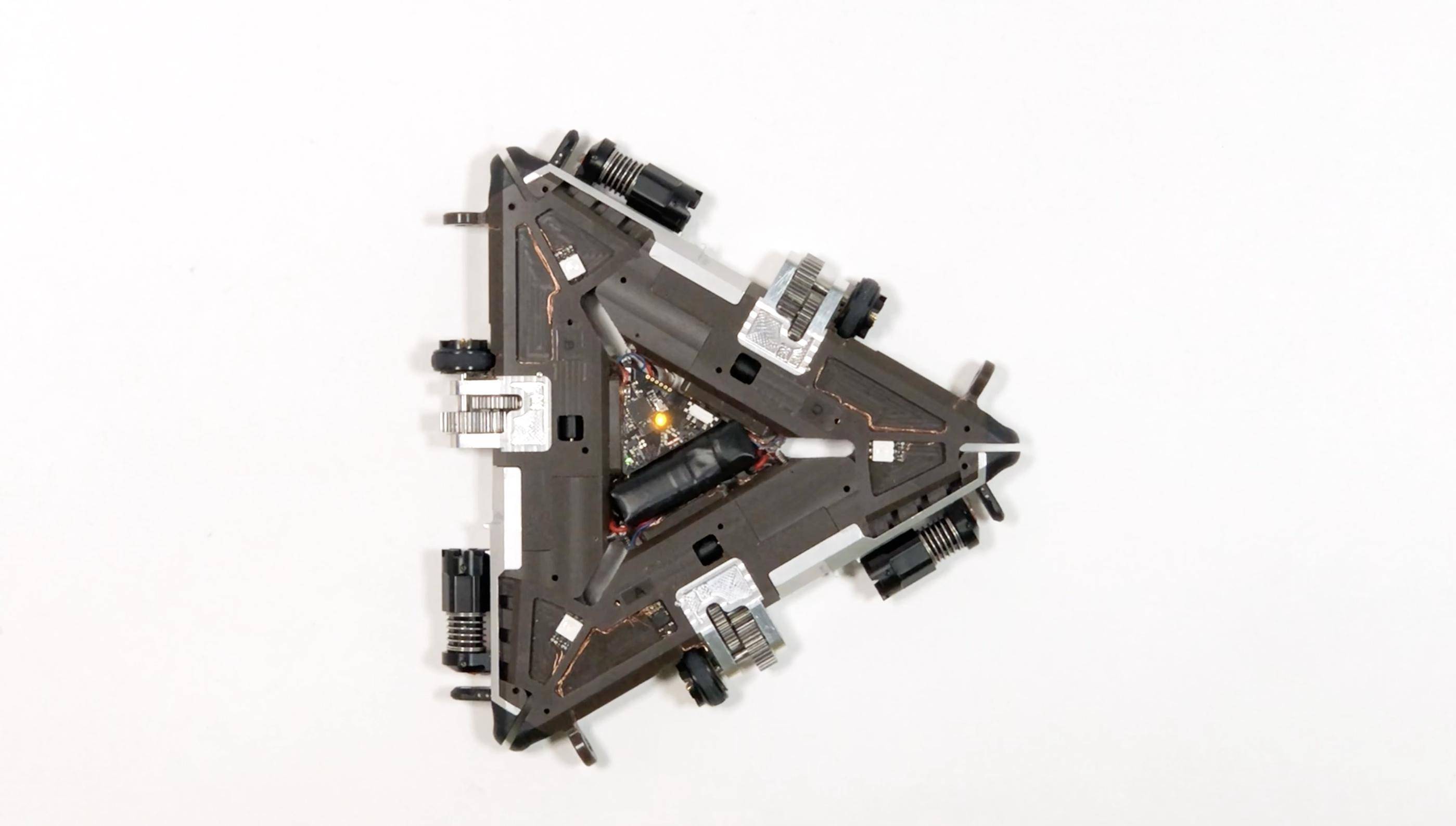
تأخذ الوحدات الفردية من الروبوت شكل المثلث، حيث تتشكل بسهولة معاً لإنشاء مضلعات ذات أحجام وتكوينات مختلفة، في عملية تُعرف باسم «شبكة المضلع».
وتقول الدكتورة جايمي بايك، الباحثة في علم الروبوتات: «إن تصميم روبوت (موري 3) يظهر قدرة الشبكات المضلعة أن تكون استراتيجية روبوتية قابلة للتطبيق».
ولتحقيق هذا الهدف، كان على الفريق الجامعي السويسري إعادة التفكير جيداً بالجوانب والخصائص المختلفة للروبوتات، بما في ذلك التصميمان الميكانيكي والإلكتروني وأنظمة الحاسوب والهندسة «أي إعادة التفكير في طريقة فهمنا للروبوتات»، كما تقول بايك.
تستطيع الروبوتات التي تعمل بالمبدأ نفسه أن تغير شكلها، وتتصل وتتواصل مع بعضها البعض، وأن تتشكل مجدداً.
وتعدّ الدكتورة جايمي بايك أن إثبات هذا المفهوم يُعد نجاحاً كبيراً، نظراً لأن روبوتات «موري 3» تتميز بقدرتها على تنفيذ أهم 3 خصائص في عالم الروبوتات، وهي التنقل، والتعامل مع الأشياء ونقلها، والتفاعل مع المستخدمين.
ما ميزة إنشاء روبوتات معيارية ومتعددة الوظائف؟
توضح بايك أنه لأداء مجموعة واسعة من المهام، يجب أن تكون الروبوتات قادرة على تغيير شكلها أو تكوينها، حيث تستخدم الروبوتات متعددة الأضلاع ومتعددة الأشكال التي تتصل ببعضها البعض لإنشاء هياكل مفصلية بشكل فعال لمجموعة متنوعة من التطبيقات.
وعلى الرغم من أن الروبوتات متعددة الأغراض مثل «موري 3» قد تكون أقل فعالية من الروبوتات المتخصصة في مناطق معينة، فإن أهم ما يميز روبوتات «موري 3» هي «مرونتها» حسب وصفها.
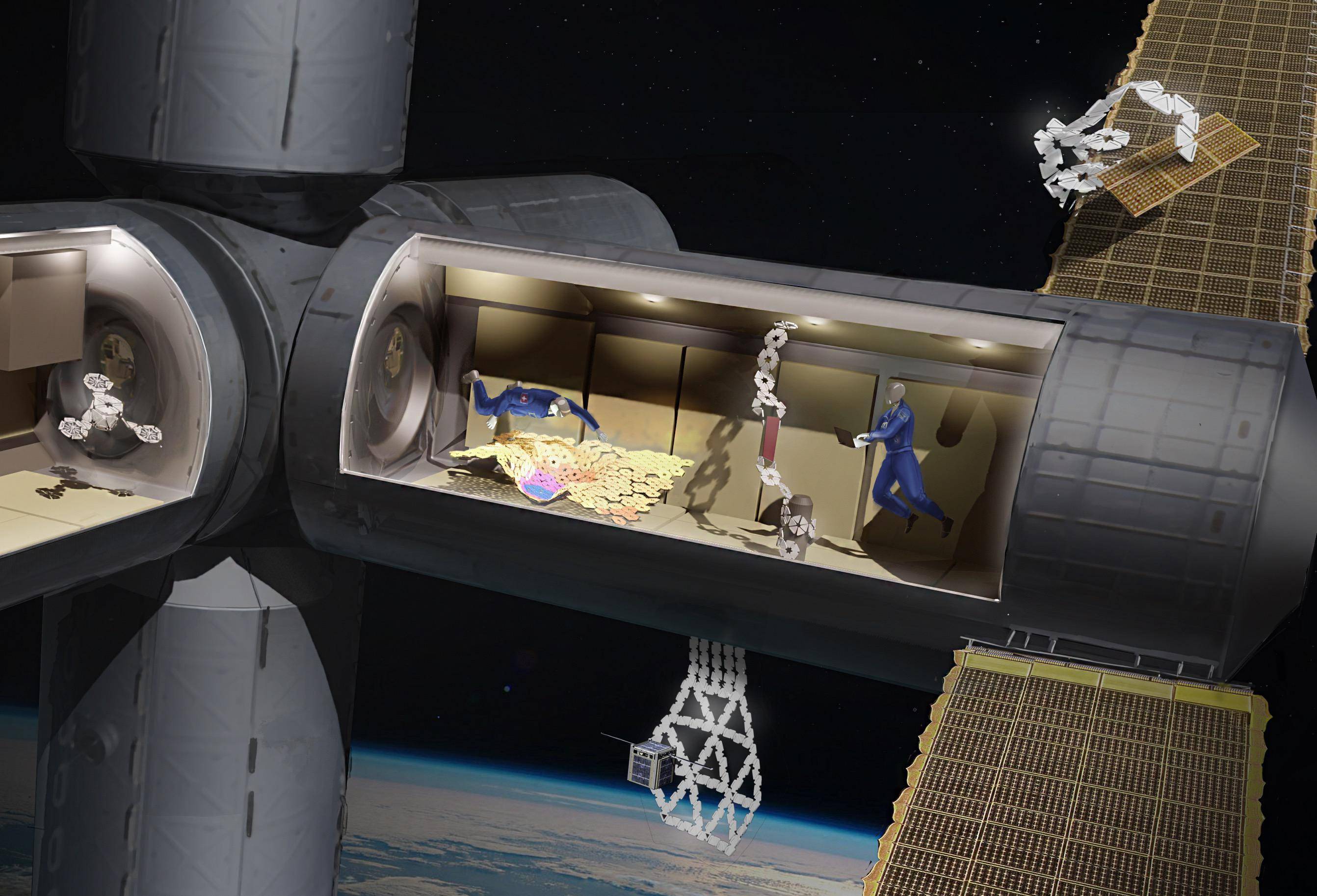
تم تصميم روبوتات «موري 3» جزئياً لاستخدامها داخل المركبات الفضائية، التي لا تحتوي على مساحة لتخزين روبوتات مختلفة لكل مهمة فردية يجب تنفيذها. ويأمل الباحثون أن يتم استخدام روبوتات «موري 3» لأغراض الاتصال والإصلاحات الخارجية.