أعلنت وكالة الفضاء اليابانية (جاكسا) اليوم (الاثنين) أنها أوقفت إمدادات الطاقة عن مسبارها «سليم» (SLIM) بعد أقل من ثلاث ساعات من هبوطه التاريخي على سطح القمر السبت، من أجل توفير الطاقة في بطارياته لإعادة تشغيل محتملة.
وبحسب «فرنس برس»، أشارت الوكالة اليابانية إلى أن هناك «إمكانية» لإعادة تشغيل الوحدة اليابانية «سليم» التي واجهت مشكلة في الألواح الشمسية.
وقالت وكالة الفضاء اليابانية: «بحسب بيانات القياس عن بعد، فإن خلايا (سليم) الشمسية موجهة نحو الغرب. وإذا ضرب ضوء الشمس القمر من جهة الغرب في المستقبل، فإننا نعتقد أنه من الممكن إنتاج الطاقة، ونحن نستعد حالياً لإعادة التشغيل».
ولفتت الوكالة عبر شبكات التواصل الاجتماعي: «تمكنّا من استكمال نقل البيانات الفنية والصور التي تم الحصول عليها أثناء الهبوط وعلى سطح القمر قبل انقطاع التيار الكهربائي».
وأصبحت اليابان السبت خامس دولة في العالم تنفذ بنجاح عملية هبوط على سطح القمر.
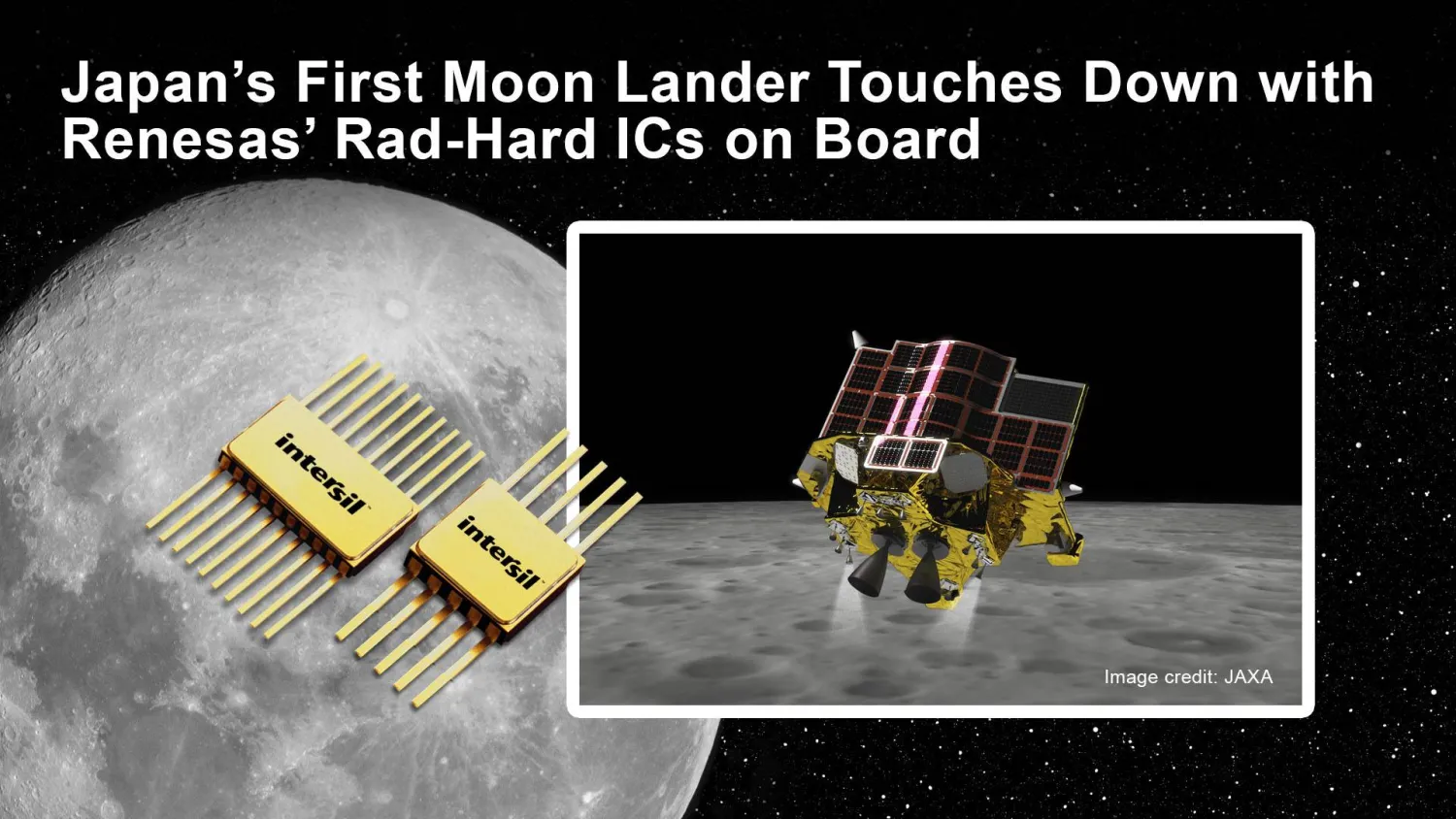
بعد نزول مذهل استمر عشرين دقيقة، أعلنت وكالة الفضاء اليابانية أن وحدة «سليم» (SLIM)، وهي الأحرف الإنجليزية الأولى لعبارة تعني «مركبة الهبوط الذكية لاستكشاف القمر»، هبطت في الساعة 00:20 صباح السبت (15:20 ت.غ الجمعة) وأقيم اتصال معها، ولكن بسبب تعذر عمل الألواح الشمسية، لن يحصل المسبار الملقب «مون سنايبر» (قناص القمر) لقدرته على الهبوط بدقة، على الكهرباء إلا «لساعات»، وفق ما حذر هيتوشي كونيناكا، أحد المسؤولين في وكالة «جاكسا».
وقال كونيناكا إن الألواح قد تعاود عملها عند تغير زاوية الشمس، في حين يعمل الفريق على الإفادة بالحد الأقصى من النتائج العلمية للمهمة من خلال نقل البيانات التي يتم الحصول عليها إلى الأرض.
«سليم» (SLIM) واحدة من مهام كثيرة إلى القمر أطلقتها أخيراً دول وشركات خاصة، لكن حتى الآن، لم تنجح سوى الولايات المتحدة والاتحاد السوفياتي والصين، وأخيراً الهند، في الهبوط على سطح القمر.
«شراكة في الكون»
وتأمل «جاكسا» في تحليل البيانات التي تم الحصول عليها أثناء الهبوط على القمر لتحديد ما إذا كانت المركبة حققت مرادها بالهبوط على بعد 100 متر من هدفها.
هبطت المركبة «سليم» في حفرة صغيرة قطرها أقل من 300 متر، تسمى «شيولي»، حيث كان من المقرر أن تجري تحاليل على السطح.
وقالت وكالة الفضاء اليابانية إن العربتين المصغرتين اللتين يحملهما المسبار «سليم» تم إطلاقهما بشكل طبيعي، بما في ذلك مسبار كروي يسمى «سورا-كيو» (SORA-Q)، وهو بالكاد أكبر من كرة التنس، يمكنه تعديل شكله للتحرك على التربة القمرية. وطوّرته «جاكسا» بالشراكة مع عملاق الألعاب الياباني «تاكارا تومي» (Takara Tomy).
وقال عالم الفلك في مركز هارفارد سميثسونيان للفيزياء الفلكية جوناثان ماكدويل إنه رغم أنه يجب التأكد من دقة الهبوط على القمر، «أعتقد أن المهمة حققت نجاحاً كبيراً».
وأوضح لوكالة «فرنس برس» أن مشكلات عدة قد تكون السبب وراء مشكلة الألواح الشمسية. وقال ماكدويل: «قد يكون هناك كابل مفكوك، أو كابل تم توصيله بطريقة خاطئة، أو قد تكون مركبة الهبوط في وضع عكسي وغير قادرة على رؤية الشمس لسبب ما».
تحدّ تكنولوجي
ومُنيت المحاولتان اليابانيتان الأوليان في هذا المجال بالفشل؛ ففي عام 2022، سعت طوكيو إلى إنزال مركبة «أوموتيناشي» (الضيافة باليابانية) على متن مهمة «أرتيميس 1» التابعة لوكالة الفضاء الأميركية (ناسا)، لكن الاتصال مع المركبة فُقد بسبب خلل في بطارياتها بعد قذفها إلى الفضاء.
وفي أبريل (نيسان) 2023، تحطمت مركبة شركة «آيسبيس» اليابانية الناشئة على سطح القمر، بعدما فشلت في مرحلة الهبوط السلس.
ولا يزال الوصول إلى القمر تحدياً تكنولوجياً كبيراً حتى بالنسبة للقوى الفضائية الكبرى؛ إذ فُقِد هذا الشهر أثرُ مركبة هبوط قمرية تابعة لشركة أميركية كانت قد أخفقت في مهمتها بعد تعرضها لتسرب وقود، ويُحتمَل أن تكون تفككت لدى دخولها الغلاف الجوي للأرض، على ما أعلنت شركة «أستروبوتيك» الناشئة التي صممتها.
وما لبثت وكالة الفضاء الأميركية (ناسا) أن أعلنت بعد ساعات أنها أخّرت نحو سنة المهمتين المقبلتين من برنامجها الكبير للعودة إلى القمر «أرتيميس».