اكتشاف مذهل... وجود عنصر أساسي للحياة على أحد أقمار زحلhttps://aawsat.com/%D8%B9%D9%84%D9%88%D9%85/4383936-%D8%A7%D9%83%D8%AA%D8%B4%D8%A7%D9%81-%D9%85%D8%B0%D9%87%D9%84-%D9%88%D8%AC%D9%88%D8%AF-%D8%B9%D9%86%D8%B5%D8%B1-%D8%A3%D8%B3%D8%A7%D8%B3%D9%8A-%D9%84%D9%84%D8%AD%D9%8A%D8%A7%D8%A9-%D8%B9%D9%84%D9%89-%D8%A3%D8%AD%D8%AF-%D8%A3%D9%82%D9%85%D8%A7%D8%B1-%D8%B2%D8%AD%D9%84
اكتشاف مذهل... وجود عنصر أساسي للحياة على أحد أقمار زحل
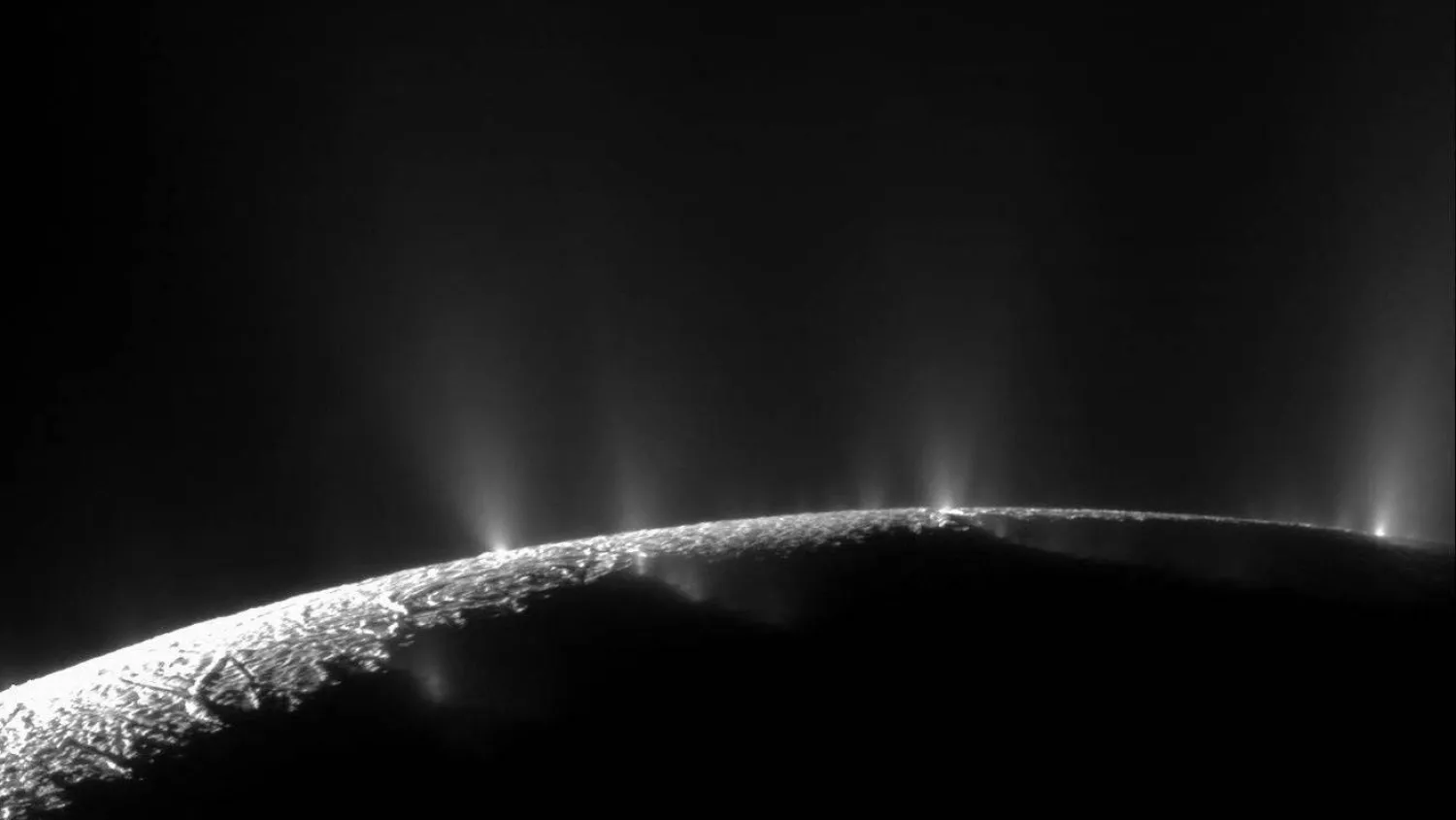
عُثر على الفوسفور في محيط تحت السطح الجليدي لإنسيلادوس، أحد أقمار كوكب زحل (رويترز)
واشنطن:«الشرق الأوسط»
TT
واشنطن:«الشرق الأوسط»
TT
اكتشاف مذهل... وجود عنصر أساسي للحياة على أحد أقمار زحل
عُثر على الفوسفور في محيط تحت السطح الجليدي لإنسيلادوس، أحد أقمار كوكب زحل (رويترز)
حصل البحث المستمر منذ زمن بعيد عن حياة خارج كوكب الأرض على جرعة دعم كبيرة، إذ عُثر على الفوسفور، وهو عنصر أساسي للحياة، في محيط تحت السطح الجليدي لإنسيلادوس، أحد أقمار كوكب زحل.
هذا الاكتشاف الذي حصل بناءً على دراسة بيانات جمعها مسبار كاسيني التابع لوكالة الفضاء الأميركية (ناسا)، نُشر الأربعاء عبر مجلة «نيتشر» العلمية المرموقة.
وقد استكشف مسبار كاسيني كوكب زحل وحلقاته وأقماره من عام 2004 حتى تدميره في الغلاف الجوي لكوكب الغاز العملاق في عام 2017.
استكشف مسبار كاسيني كوكب زحل وحلقاته وأقماره من عام 2004 (أ.ف.ب)
وقال كريستوفر غلين من معهد ساوث ويست للأبحاث، وهو أحد المعدين المشاركين في العمل البحثي: «هذا اكتشاف مذهل في مجال علم الأحياء الفلكية».
وأضاف: «وجدنا فوسفوراً وفيراً في عينات أعمدة الجليد المقذوفة من المحيط الجوفي».
وتبصق الفوارات الحارة الموجودة في القطب الجنوبي لإنسيلادوس جزيئات جليدية بالغة الدقة في الفضاء تغذي الحلقة «إي» (E) التابعة لزحل، وهي الأبعد والأرفع في الكوكب العملاق.
وكان العلماء اكتشفوا فيما مضى معادن ومركّبات عضوية في جزيئات الجليد، التي أطلقها إنسيلادوس، ولكن ليس الفوسفور، وهو عنصر أساسي في الحمض النووي والحمض النووي الريبي الموجود أيضاً في عظام وأسنان البشر والحيوانات، وحتى في عوالق المحيط.
في الواقع، لا يمكن للحياة كما نعرفها أن تكون موجودة من دون الفوسفور.
وكانت نماذج جيوكيميائية تحدثت عن إمكان وجود الفوسفور في هذه الجسيمات، وهو توقع نُشر في مقالة علمية سابقة، لكن لم يتم تأكيد ذلك بعد، على ما أوضح كريستوفر غلين.
وأوضح فرانك بوستبرغ، المتخصص في علم الكواكب في «جامعة برلين الحرة»، في تصريحات أوردها بيان وكالة «ناسا»، أن «هذه المرة الأولى التي يتم فيها اكتشاف هذا العنصر الأساسي في محيط غير موجود على كوكب الأرض».
وللتوصل إلى هذا الاكتشاف، حلل معدّو الدراسة بدقة شديدة البيانات التي جُمعت بواسطة أداة «كوسميك داست أنالايزر» (محلل الغبار الكوني) التابعة لمسبار كاسيني. وأكدوا النتائج من خلال إجراء تجارب مخبرية لإثبات أن محيط إنسيلادوس يحتوي على الفوسفور في أشكال مختلفة قابلة للذوبان في الماء.
على مدار الـ25 عاماً الماضية، اكتشف علماء الكواكب أن هناك عوالم كثيرة ذات محيطات موجودة تحت طبقة سطحية من الجليد في نظامنا الشمسي.
وثمّة ما يوجد منها على سبيل المثال على أوروبا، قمر كوكب المشتري؛ وعلى تيتان، أكبر أقمار زحل، وحتى على الكوكب القزم بلوتو.
ويجب أن تكون الكواكب التي لها محيطات سطحية، مثل الأرض، على مسافة كافية من نجمها للحفاظ على درجات حرارة توفر الظروف الملائمة لبقاء الحياة.
ويزيد اكتشاف العوالم ذات المحيطات الجوفية من عدد الكواكب التي يمكن أن تكون صالحة للعيش.
وقال كريستوفر غلين: «بهذا الاكتشاف، أصبح من المعروف الآن أن محيط إنسيلادوس يلبي ما يُعتبر عموماً أول شرط ضروري للحياة».
وأضاف: «الخطوة التالية واضحة، إذ يجب أن نعود إلى إنسيلادوس لنرى ما إذا كان المحيط الصالح للحياة مأهولاً بالفعل».
أعربت وكالة «ناسا» عن التفاؤل، الجمعة، بعد أن كشف اختبار أرضي ثان لمهمتها المتمثلة في إرسال طاقم حول القمر في أقرب وقت ممكن تقدما كبيرا بعد مشاكل تقنية سابقة.
أقمشة مطلية بالألماس تُحافظ على برودة الجسم في الأجواء الحارةhttps://aawsat.com/%D8%B9%D9%84%D9%88%D9%85/5252680-%D8%A3%D9%82%D9%85%D8%B4%D8%A9-%D9%85%D8%B7%D9%84%D9%8A%D8%A9-%D8%A8%D8%A7%D9%84%D8%A3%D9%84%D9%85%D8%A7%D8%B3-%D8%AA%D9%8F%D8%AD%D8%A7%D9%81%D8%B8-%D8%B9%D9%84%D9%89-%D8%A8%D8%B1%D9%88%D8%AF%D8%A9-%D8%A7%D9%84%D8%AC%D8%B3%D9%85-%D9%81%D9%8A-%D8%A7%D9%84%D8%A3%D8%AC%D9%88%D8%A7%D8%A1-%D8%A7%D9%84%D8%AD%D8%A7%D8%B1%D8%A9
أقمشة مطلية بالألماس تُحافظ على برودة الجسم في الأجواء الحارة
في الأيام الحارة، تحبس معظم الملابس الحرارة. لكن الأقمشة المطلية بجزيئات الألماس النانوية -وهي جسيمات ماسية متناهية الصغر- يمكنها بدلاً من ذلك إطلاق الحرارة، الأمر الذي يُساعد على تقليل استهلاك أجهزة التكييف للطاقة الكهربائية.
جسيمات الألماس النانوية
تتميز جسيمات الألماس النانوية، التي يقل امتداد كل منها عن جزء من ألف من عرض شعرة الإنسان، بالبنية البلورية الكربونية نفسها للألماس الأكبر حجماً. وهذه البنية تجعلها فعالة للغاية في نقل الحرارة.
كما أنها لا تحتاج إلى أن تكون مثالية الشكل؛ لذا يمكن تصنيعها من نفايات الكربون مثل البلاستيك، وبذلك تقل تكلفة تصنيعها نسبياً.
نسيج مطلي بالألماس
يقول شادي هوشيار، أستاذ الهندسة في جامعة «RMIT» الأسترالية، الذي طوّر فريقه نسيجاً مطلياً بالألماس النانوي في مركز ابتكار المواد والأزياء المستقبلية بالجامعة: «نظراً لخصائص الكربون الحرارية الاستثنائية، فإنه قادر على امتصاص الطاقة والحرارة بسرعة، وإطلاقها بسرعة عبر هذا النظام».
ويُستخدم الألماس بالفعل في الإلكترونيات للمساعدة في تبريد أجزاء مثل رقائق الكمبيوتر؛ لذا أدرك الباحثون إمكانية تطبيق الفكرة نفسها في الملابس.
امتصاص حرارة الجسم
يقول هوشيار: «قررنا إضافة الألماس النانوي إلى المنسوجات. فعند ملامسته الجلد، يمتص الحرارة بسرعة من الجسم، ثم يُطلقها. وهو مفيد بشكل خاص في المناطق التي ترتفع حرارتها مثل البدن».
ويضيف: «يتمتع الألماس النانوي بقدرة عالية على امتصاص الحرارة، لذا يمكنه سحب الحرارة من الجسم لساعات طويلة». ويشير إلى أنه على الرغم من إمكانية استخدامه في أي نوع من الملابس، فإنه قد يكون مفيداً أيضاً في معدات الحماية الشخصية لرجال الإطفاء.
خفض درجة الحرارة
يمكن للملابس المصنوعة من هذا النسيج أن تخفض درجة حرارة الجسم بمقدار 4 إلى 5 درجات فهرنهايت (2 إلى 3 درجات مئوية)، وهو ما يكفي لتقليل الحاجة إلى تشغيل مكيف الهواء بأقصى طاقته للشعور بالراحة في الحر الشديد. كما يمكن للستائر المصنوعة من نسيج مطلي بجزيئات نانوية من الألماس أن تحافظ على برودة المنازل؛ ويمكن أيضاً دمج هذه الجزيئات في طلاء المنازل.
لإضافة هذه المادة إلى النسيج، يستخدم العلماء مادة رابطة مستدامة، يقول هوشيار إنها قادرة على تثبيت جسيمات الألماس النانوية بإحكام لمدة 50 دورة غسيل على الأقل. ويعمل الفريق حالياً على تطوير طريقة لطلاء الخيوط بطبقة من هذه المادة في مرحلة مبكرة من عملية التصنيع.
تصنيع جسيمات الألماس
ويمكن تصنيع جزيئات الألماس النانوية من نفايات الكربون، بما في ذلك النفايات البلاستيكية، عن طريق تعريض الكربون لضغط ودرجة حرارة عاليتين في مفاعل، ما يؤدي إلى إعادة ترتيب الذرات في بنية ماسية. ومن خلال تعديل العملية، يمكن منح المادة خصائص أخرى، بما في ذلك القدرة على امتصاص الرطوبة أو إطلاقها.
مواد آمنة
ويقول هوشيار: «هناك احتمال أن يحل هذا محل المركبات الكيميائية الأبدية. ولذا وعلى عكس الطلاءات الكيميائية الأبدية المستخدمة في صناعة سترات المطر وغيرها من الملابس المقاومة للماء، فإن جسيمات الألماس النانوية غير سامة وآمنة بيئياً».
إعادة تصميم الملابس
مع ازدياد احتمالات ظهور موجات الحر الشديدة نتيجة تغير المناخ، يبحث باحثون آخرون عن طرق جديدة لإعادة تصميم الملابس للحفاظ على برودة الجسم. استخدم مهندسون في جامعة ماساتشوستس أمهيرست حديثاً كربونات الكالسيوم -وهي مادة طباشيرية منخفضة التكلفة- لطلاء أقمشة انخفضت درجة حرارتها عدة درجات في الاختبارات. ويجري باحثون آخرون تجارب على مواد مثل أسلاك الفضة النانوية وأكسيد الزنك.
ويبحث فريق هوشيار الآن عن تمويل لتحويل هذا البحث إلى شركة ناشئة.
هل يغيّر الذكاء الاصطناعي طريقة تفكير الطبيب؟https://aawsat.com/%D8%B9%D9%84%D9%88%D9%85/5252568-%D9%87%D9%84-%D9%8A%D8%BA%D9%8A%D9%91%D8%B1-%D8%A7%D9%84%D8%B0%D9%83%D8%A7%D8%A1-%D8%A7%D9%84%D8%A7%D8%B5%D8%B7%D9%86%D8%A7%D8%B9%D9%8A-%D8%B7%D8%B1%D9%8A%D9%82%D8%A9-%D8%AA%D9%81%D9%83%D9%8A%D8%B1-%D8%A7%D9%84%D8%B7%D8%A8%D9%8A%D8%A8%D8%9F
عندما ينظر الطبيب إلى شاشة التحليل، قد لا يكون ما يراه مجرد بيانات طبية، بل اقتراحاً كاملاً للتشخيص صاغته خوارزمية خلال ثوانٍ... في تلك اللحظة، لا يدور السؤال حول دقة هذا الاقتراح فحسب، بل حول تأثيره الخفي: هل يساعد هذا الاقتراح الطبيب على التفكير، أم يغيّر طريقته في التفكير دون أن يشعر؟
الذكاء الاصطناعي... طرف غير مرئي في القرار
هذا التحول الصامت في العلاقة بين الطبيب والمعلومة هو ما بدأت الأبحاث الحديثة في استكشافه، مع دخول أنظمة الذكاء الاصطناعي إلى صميم القرار السريري. فلم يعد الذكاء الاصطناعي مجرد أداة لتحليل البيانات، بل أصبح طرفاً غير مرئي في تشكيل الحكم الطبي، يؤثر في كيفية قراءة المعلومات وربطها، وربما في المسار الذهني الذي يقود إلى القرار النهائي.
دراسة علمية حديثة
هذا السؤال حاولت الإجابة عنه دراسة علمية حديثة نُشرت في فبراير (شباط) 2026 في مجلة نيتشر ميديسن (Nature Medicine)، حيث صمم الباحثون تجربة سريرية محكمة لاختبار تأثير أنظمة الذكاء الاصطناعي على طريقة تحليل الأطباء للحالات الطبية واتخاذهم للقرارات التشخيصية.
قاد الدراسة فريق بحثي دولي من جامعة ستانفورد في ولاية كاليفورنيا الأميركية بالتعاون مع باحثين من مختبرات «غوغل ريسيرش» و«غوغل ديب مايند». وشارك في الإشراف على البحث الطبيب والعالم الأميركي إيوان آشلي (Euan Ashley)، إلى جانب الباحثين جاك أوسوليفان (Jack W. O’Sullivan) وتاو تو (Tao Tu)، وعدد من المتخصصين في الطب والذكاء الاصطناعي.
التجارب السريرية للذكاء الاصطناعي الطبي
تجربة سريرية تحاكي الواقع الطبي
اعتمد الباحثون في هذه الدراسة على تصميم علمي يعرف باسم «التجربة العشوائية المحكمة»، وهو من أكثر الأساليب العلمية دقة وموثوقية في تقييم التقنيات الطبية.
ولمحاكاة الظروف الحقيقية للعمل داخل العيادات، طُلب من مجموعة من أطباء القلب تحليل حالات سريرية حقيقية لمرضى، باستخدام بيانات طبية متعددة، شملت تخطيط القلب الكهربائي وصور القلب واختبارات الجهد وغيرها من المعلومات السريرية المعقدة.
ثم قُسم الأطباء إلى مجموعتين: الأولى قامت بتقييم الحالات بالطريقة التقليدية دون أي مساعدة رقمية، بينما حصلت المجموعة الثانية على دعم من نظام ذكاء اصطناعي طبي يُعرف باسم AMIE، وهو نموذج يعتمد على تقنيات الذكاء الاصطناعي التوليدي لتحليل البيانات الطبية وتقديم تقييم أولي للحالة.
وكان الهدف من هذه التجربة معرفة ما إذا كانت مساعدة الذكاء الاصطناعي يمكن أن تؤثر في طريقة تحليل الطبيب للحالة الطبية أو في جودة القرار السريري الذي يتخذه.
تقييم القرارات دون معرفة مصدرها
ولضمان حياد النتائج، اتبع الباحثون خطوة منهجية مهمة. فقد عُرضت تحليلات الأطباء للحالات على مجموعة من أطباء القلب المتخصصين ليقوموا بمراجعتها وتقدير جودتها العلمية.
غير أن هؤلاء الخبراء لم يكونوا على علم بما إذا كانت تلك التحليلات قد أُعدّت بمساعدة نظام الذكاء الاصطناعي أم من دونه. وقد سمح هذا الأسلوب العلمي، المعروف باسم «التقييم المعمّى» (Blinded Evaluation)، بمقارنة مستوى القرارات الطبية بصورة موضوعية، بعيداً عن أي تأثير لمعرفة مصدر التقييم.
* الأطباء تعاملوا مع توصيات النظام الذكي بوصفها أداة تحليل إضافية وليس بوصفها قراراً نهائياً *
ماذا كشفت الدراسة؟
أظهرت نتائج التجربة أن استخدام الذكاء الاصطناعي يمكن أن يساعد الأطباء على تنظيم المعلومات الطبية وتحليل البيانات المعقدة بصورة أكثر شمولاً. ففي الحالات التي تضمنت كميات كبيرة من البيانات السريرية، ساهم النظام الذكي في تسهيل تجميع المعلومات وربطها ببعضها، وهو ما قد يساعد الطبيب على تكوين صورة أوضح للحالة المرضية.
لكن النتائج أشارت أيضاً إلى جانب مهم في طبيعة العلاقة بين الطبيب وهذه الأنظمة. فقد تعامل الأطباء مع التوصيات التي قدمها النظام الذكي بوصفها أداة تحليل إضافية، وليس بوصفها قراراً نهائياً.
بمعنى آخر، أظهر الأطباء ميلاً إلى استخدام مخرجات الذكاء الاصطناعي كوسيلة لدعم التفكير السريري وإعادة فحص المعلومات الطبية، مع بقاء عملية الحكم الطبي النهائي قائمة على خبرتهم السريرية وتقييمهم الشامل لحالة المريض.
الطبيب يقود والذكاء الاصطناعي يدعم القرار الطبي
استقلالية الحكم السريري
واللافت في النتائج أن الأطباء لم يتعاملوا مع توصيات النظام بوصفها إجابة جاهزة، بل كمنطلق لإعادة التفكير، وهو ما يعكس بقاء الحكم السريري مستقلاً رغم حضور الذكاء الاصطناعي.
ولم يكن هدف الباحثين قياس دقة القرارات الطبية فقط، بل فهم تأثير الذكاء الاصطناعي في طريقة تفكير الطبيب نفسه أثناء تحليل الحالة. فالدراسة حاولت اختبار ما إذا كانت التوصيات التي يقدمها النظام الذكي يمكن أن تؤثر في المسار الذهني الذي يتبعه الطبيب عند تقييم المعلومات السريرية، وهو مجال بحثي جديد يدرس التفاعل بين الإنسان والذكاء الاصطناعي في اتخاذ القرار الطبي.
كيف يتغير التفكير الطبي؟
تشير نتائج هذه الدراسة إلى تحول تدريجي في طريقة عمل الأطباء داخل البيئة الطبية الحديثة. فمع ظهور أنظمة الذكاء الاصطناعي القادرة على تحليل كميات هائلة من البيانات الطبية، لم يعد الطبيب يعمل مع المعلومات وحده، بل أصبح يتعامل مع طبقة إضافية من التحليل الرقمي تساعده على قراءة المعطيات المعقدة بسرعة أكبر.
وفي هذا النموذج الجديد من الممارسة الطبية، تقوم الأنظمة الذكية بدور تحليل البيانات واكتشاف الأنماط الإحصائية الخفية، بينما يبقى دور الطبيب في تفسير هذه النتائج وربطها بالسياق السريري الكامل للمريض.
وبذلك لا يصبح الذكاء الاصطناعي صانع القرار الطبي، بل أداة تحليل متقدمة قد تساعد الطبيب على رؤية تفاصيل في البيانات لم تكن واضحة من قبل، ما قد يساهم في تحسين دقة التقييم السريري واتخاذ القرار العلاجي.
ما الذي يعنيه هذا للأنظمة الصحية؟
تشير نتائج هذه الدراسة إلى أن نجاح الذكاء الاصطناعي في الطب لا يعتمد على تطور الخوارزميات وحده، بل على الطريقة التي تُدمج بها هذه التقنيات داخل منظومة الرعاية الصحية. فالتكنولوجيا، مهما بلغت دقتها، لا يمكن أن تحقق فائدتها الكاملة ما لم تعمل ضمن بيئة طبية منظمة تسمح بتبادل البيانات وتحليلها بصورة آمنة وموثوقة.
ولهذا السبب تؤكد دراسات الصحة الرقمية أن أحد أهم شروط الاستفادة من الذكاء الاصطناعي هو وجود بنية رقمية متطورة تشمل السجلات الطبية الإلكترونية وقواعد البيانات السريرية القابلة للتحليل.
وتبرز أهمية هذا التحول في الدول التي تستثمر في التحول الصحي الرقمي، مثل المملكة العربية السعودية، حيث تعمل مبادرات «رؤية 2030» على تطوير السجلات الصحية الإلكترونية وتوسيع استخدام التقنيات الذكية في المستشفيات ومراكز الرعاية الصحية.
وفي مثل هذه البيئات الرقمية يمكن للذكاء الاصطناعي أن يساعد الأطباء على تحليل كميات كبيرة من البيانات الطبية بسرعة أكبر، مما قد يساهم في تحسين دقة التشخيص ودعم اتخاذ القرار السريري.
مستقبل القرار الطبي
تشير هذه الدراسة إلى أن تأثير الذكاء الاصطناعي في الطب قد يتجاوز مجرد إدخال أدوات تقنية جديدة إلى العيادة. فمع استخدام هذه الأنظمة في تحليل البيانات الطبية المعقدة، قد يتغير أيضاً الأسلوب الذي يتعامل به الأطباء مع المعلومات السريرية عند تقييم الحالات المرضية.
غير أن نتائج التجربة تشير في الوقت نفسه إلى حقيقة أساسية: فالذكاء الاصطناعي قد يساعد في تحليل البيانات وتنظيمها، لكنه لا يستطيع أن يحل محل الخبرة السريرية للطبيب أو قدرته على فهم السياق الكامل لحالة المريض.
ولهذا قد يكون مستقبل القرار الطبي في السنوات القادمة قائماً على تفاعل جديد بين الإنسان والتكنولوجيا، حيث تساعد الأنظمة الذكية في قراءة البيانات الطبية، بينما يبقى الطبيب المسؤول عن تفسير هذه المعطيات وربطها بالإنسان الذي يقف خلفها.
أما في العالم العربي، فإن الاستفادة الحقيقية من هذه التطورات تتطلب الاستثمار في السجلات الطبية الرقمية وتطوير البنية التحتية للبيانات الصحية، إضافة إلى تدريب الأطباء على استخدام أدوات الذكاء الاصطناعي بوصفها أدوات دعم للقرار الطبي لا بديلاً عنه.
الحصول على قسط كافٍ من النوم أمر بالغ الأهمية. فقد وجدت دراسة أجريت عام 2018 أن الأشخاص الذين ينامون من خمس إلى ست ساعات أقل إنتاجية بنسبة 19 في المائة من أولئك الذين ينامون بانتظام من سبع إلى ثماني ساعات في الليلة. أما الأشخاص الذين ينامون أقل من خمس ساعات، فتكون إنتاجيتهم أقل بنسبة 30 في المائة تقريباً... صحيح أنهم يبقون مستيقظين لفترة أطول، لكنهم في الواقع ينجزون أقل.
النوم مفيد لحل المشكلات الأصعب
يعود ذلك إلى أن أبحاثاً أخرى تُظهر أن الاكتفاء بست ساعات من النوم يجعل أي مهمة تتطلب تركيزاً أو تفكيراً عميقاً أو حلاً للمشكلات أكثر صعوبة.
*النوم 4 ساعات فقط يشبه شرب 5 أقداح مشروبات كحولية*
وفي الواقع، وفيما يتعلق بجوانب مثل الانتباه وسرعة رد الفعل، فإن النوم ست ساعات فقط يُشبه شرب بضعة أقداح من مشروبات كحولية، بينما يشبه النوم أربع ساعات فقط شرب خمسة أقداح مشروبات كحولية. كما تُظهر أبحاث أخرى أن الحرمان من النوم يجعل إنجاز أي نشاط يتطلب إجراء خطوات متعددة – إذ إن أي شيء تحاول القيام به تقريباً – يضحى أكثر صعوبة.
وإن لم يكن ذلك كافياً، فقد أظهرت دراسة أخرى أن قلة النوم تُسبب زيادة في نشاط مراكز المكافأة في الدماغ المسؤولة عن الطعام. كما أن اتباع نظام غذائي سيئ يُؤدي إلى قلة النوم، ما يُؤدي بدوره، للأسف، إلى اتباع نظام غذائي أسوأ.
«طريقة النوم العسكرية»
كيف تنام أسرع وبطريقة سهلة؟ في كتاب «استرخِ واربح: أداء البطولة» (Relax and Win: Championship Performance) الصادر عام 2012، يصف لويد باد وينتر روتيناً ابتكرته مدرسة الطيران التمهيدية التابعة للبحرية، لمساعدة الطيارين على النوم بشكل أسرع وأسهل.
وظهر أنه بعد ستة أسابيع من اتباع الطريقة، تمكّن 96 في المائة من الطيارين من النوم في غضون دقيقتين أو أقل: أثناء جلوسهم على كرسي، والاستماع إلى تسجيل لإطلاق نار رشاش، وبعد شرب القهوة.
خطوات الطريقة
إليك الطريقة:
* أرخِ عضلات وجهك بالكامل. أغمض عينيك. تنفّس ببطء وعمق. ثم أرخِ جميع عضلات وجهك ببطء. (ابدأ مثلاً بعضلات جبهتك وانزل تدريجياً). أرخِ فكّك، وخديك، وفمك، ولسانك، وكل شيء... حتى عينيك؛ دعهما يسترخيان.
* أرخِ كتفيك ويديك. تخلّص من أي توتر. أرخِ رقبتك، وعضلات ظهرك؛ اشعر وكأنك تغوص في الكرسي أو السرير. ثم ابدأ من أعلى ذراعك الأيمن، وأرخِ عضلات ذراعيك، وساعديك، ويديك ببطء. كرّر ذلك على الجانب الآخر. ولا تنسَ أن تستمر في التنفس ببطء وعمق.
* ازفر وأرخِ صدرك. مع استرخاء كتفيك وذراعيك، سيكون ذلك سهلاً.
* أرخِ ساقيك. ابدأ بفخذك اليمنى؛ دعها تغوص في الكرسي أو السرير. ثم افعل الشيء نفسه مع ساقك، وكاحلك، وقدمك. كرّر العملية مع ساقك اليسرى.
* الآن صفِّ ذهنك. صحيح أن من الصعب عدم التفكير في أي شيء. إذا كنت كذلك، فحاول أن تُبقي صورة في ذهنك. اختر شيئاً مُريحاً. تخيّل نفسك مُستلقياً بشكل مريح في الظلام. لكن إن لم ينجح ذلك، فجرّب تكرار عبارة «لا تُفكّر» لمدة عشر ثوانٍ. على الأقل، سيساعدك هذا على تشتيت انتباهك عن التفكير في أي شيء قد يُبقيك مستيقظاً.
الممارسة هي المفتاح
قد لا تُساعدك طريقة النوم العسكرية على النوم أسرع في المرات الأولى، ولكن كلما استخدمتها بانتظام، درّبت نفسك على الاسترخاء والتخلص من الأفكار.