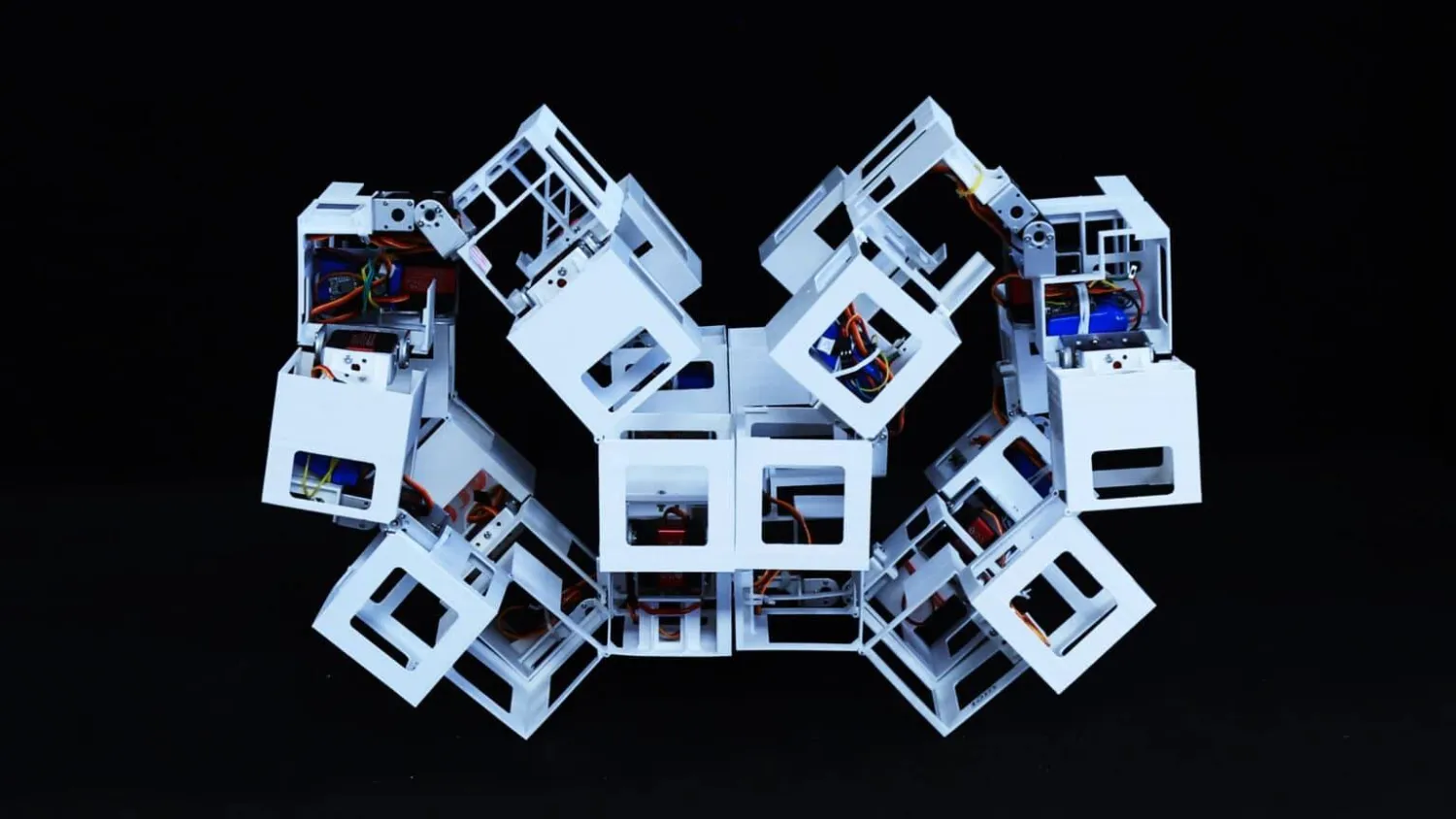
ابتكر باحثون من جامعة ولاية كارولينا الشمالية الأميركية فئةً من الروبوتات مصنوعة من صفائح رقيقة يمكنها التحول إلى مئات الأشكال المستقرة الأخرى، وتنفيذ مجموعة واسعة من الحركات على الرغم من أنها لا تحتوي على محركات.
ووفق الباحثين، تشبه هذه الروبوتات التي يطلق عليها «ميتا بوتس» في جوهرها صفائح بلاستيكية متحركة، قادرة على التحرك على سطح ما أو الإمساك بالأشياء.
ويقول جي ين، المؤلف المراسل لورقة بحثية حول هذا العمل وأستاذ الهندسة الميكانيكية والفضائية في جامعة ولاية كارولينا الشمالية: «نبدأ بصفائح بوليمرية بسيطة مثقوبة، ولكن من خلال وضع أغشية رقيقة على سطحها، نتمكن من دمج مواد تستجيب للمجالات الكهربائية أو المغناطيسية».
ويضيف: «تعمل هذه الأغشية كمشغلات تسمح لنا بتغيير شكل الصفائح عن بُعد».
وترتكز نتائج الدراسة التي نُشِرت، الأربعاء، في مجلة «ساينس أدفانسز»، على ربط العديد من الصفائح المسطحة القابلة للانحناء والطي ذاتياً، التى يمكن التحكم فيها عن بعد، عبر تطبيق مجالات كهربية ومغناطيسية عليها، لتشكل معاً مجموعة واسعة من الأشكال الجديدة الأخرى.
ويقول كايزي تشو، المؤلف الرئيسي للورقة البحثية والحاصل على درجة الدكتوراه في جامعة ولاية كارولاينا الشمالية: «من خلال ربط صفائح متعددة، ننشئ هياكل مسطحة في البداية، ولكن يمكنها بعد ذلك أن تنحني وتطوي نفسها إلى مجموعة واسعة من التكوينات الثابتة»، وأضاف: «على سبيل المثال، إذا قمنا بتوصيل أربع صفائح، نحصل على روبوت (ميتابوت) يمكنه الاستلقاء بشكل مسطح كقطعة ورق، ولكنه قادر أيضاً على أن يطوي نفسه إلى 256 حالة مستقرة أخرى مختلفة».
وكان الفريق البحثي قد نجح في دراسة سابقة، نشرت في دورية «نيتشر كومينيكيشين»، في اكتشاف طريقة لتحويل هياكل بلاستيكية مكعبة إلى أشكال أخرى نشطة مستوحاة من فن طي الورق المعروف بـ«الأريجامي»، وهو ما مهد الطريق لابتكار وتطوير أنظمة اصطناعية متغيرة الشكل يمكنها القيام بوظائف متعددة وحتى حمل حمولة -مثل الهياكل الروبوتية متعددة الاستخدامات المستخدمة في الفضاء، على سبيل المثال، ولكن عن طريق الاستعانة بمحركات كي تفي بهذه الأغراض الوظيفية.
لكن الربوتات الجديدة التي جرى ابتكارها من قبل فريق الدراسة الجديدة قادرة على تغيير شكلها وطريقة حركاتها دون أي محركات، كما يمكنها اللف والدوران، وفق الظروف المحيطة بها والوظيفة المنوط بالربوتات القيام بها.
ويقول تشو: «يمكن للروبوتات المطورة تغيير شكلها وطريقة مشيتها للتكيف مع مختلف التضاريس أو لأداء مجموعة متنوعة من الوظائف، مثل الإمساك بالأشياء ورفعها. وعندما ندمج مواد كهرضغطية في الأغشية الرقيقة، يمكننا إحداث اهتزازات متحكم بها في الروبوتات (الميتابوت) عن طريق تغيير الجهد الكهربي، مما يمنحنا تحكماً إضافياً في حركتها. على سبيل المثال، يمكننا جعل الروبوت (الميتابوت) يدور يساراً أو يميناً مع بقائه ثابتاً في مكانه».
ويقول ين: «هذا العمل لا يزال في مرحلة مبكرة، وهو بمثابة إثبات للمفهوم، ولكنه يُظهر أن هذا النهج في مجال الروبوتات غير مكلف وقابل للتكيف بدرجة كبيرة. كان هدفنا هو ربط المواد الميتابوتية بالروبوتات، ونعتقد أن النتائج واعدة».