سوار «فيت بيت شارج 3» أذكى من أجهزة متابعة الرشاقة العاديةhttps://aawsat.com/home/article/1451216/%D8%B3%D9%88%D8%A7%D8%B1-%C2%AB%D9%81%D9%8A%D8%AA-%D8%A8%D9%8A%D8%AA-%D8%B4%D8%A7%D8%B1%D8%AC-3%C2%BB-%D8%A3%D8%B0%D9%83%D9%89-%D9%85%D9%86-%D8%A3%D8%AC%D9%87%D8%B2%D8%A9-%D9%85%D8%AA%D8%A7%D8%A8%D8%B9%D8%A9-%D8%A7%D9%84%D8%B1%D8%B4%D8%A7%D9%82%D8%A9-%D8%A7%D9%84%D8%B9%D8%A7%D8%AF%D9%8A%D8%A9
سوار «فيت بيت شارج 3» أذكى من أجهزة متابعة الرشاقة العادية
لندن:«الشرق الأوسط»
TT
لندن:«الشرق الأوسط»
TT
سوار «فيت بيت شارج 3» أذكى من أجهزة متابعة الرشاقة العادية
في عصر الساعات الذكية المجهزة برقائق خلوية وشاشات كبيرة تغطي واجهة الجهاز بالكامل، يمكن اعتبار سوار «فيت بيت شارج 3» Fitbit Charge 3 كنوع من العودة إلى الوراء، إذ إنه لا يأتي بشاشة ملوّنة، ولا يسمح لكم بتحميل تطبيقات طرف ثالث، ولا يخزّن الموسيقى. ولكن على الرغم من غياب كثير من الأشياء التي تضفي سمة الذكاء على الساعة الذكية في تصميم هذا الجهاز قد يصبح «شارج 3» الجهاز الأقوى بين منتجات «فيت بيت». صحيح أنّ ساعات «آيكونيك» و«فيرسا» تأتي بأسعار أعلى وميزات أكثر، ولكنّ «شارج 3» يحقق التوازن الأمثل بين كونه ساعة ذكية وجهازاً لمتابعة الرشاقة. لذا، بدل السير على خطى «آبل» و«سامسونغ» وأجهزتهما ذات الشاشات الكبيرة التي تتيح لكم تلقي الاتصالات وإطفاء الأضواء واللعب بالألعاب، يتمتع «شارج 3» بالذكاء الكافي لتحجز لها مكانة في مجال يعجّ بالأجهزة القابلة للارتداء. تصميم جديد لن يساعدكم «شارج 3» في الابتعاد عن هاتفكم أو يتيح لكم ترك هاتفكم في المنزل أثناء الخروج ليلاً، ولكنّه قد يدفعكم إلى التفكير ملياً، التفكير بكمّ الأمور التي تريدون لجهازكم الذكي أن يقوم بها. ورغم أن الكثيرين هم من محبي الساعات الذكية وعادة ما ينجذبون للساعات التي تقدّم ميزات كثيرة وليس العكس: «آبل واتش»، و«إل جي واتش سبورت»، و«غالاكسي واتش»، وغيرها... فإن عامل الشكل، وخدمة البطارية، والسعر، وواقع الحياة اليومي، يتيح القول إن «شارج 3» هو دون شكّ جهاز يمكن التفكير بارتدائه يومياً. فحتى دون الوظائف الكاملة التي توفرها الساعة الذكية عادة، يتيح «شارج 3» لمرتديه فرصة القيام بجميع الأشياء التي يريد فعلاً القيام بها، حتى ولو لم تلبِ جميع الوظائف التي كان يفكّر بها. يبدو الإصدار الجديد من «فيت بيت»، تماماً كما سالفه «شارج 2»، أي أقرب إلى سوار منه إلى ساعة. للوهلة الأولى، قد يبدو «شارج 3» شبيهاً بسابقاته، ولكنه يحمل اختلافات واضحة. يتميّز السوار الجديد بشاشة «شارج 2» العمودية المستطيلة التصميم نفسها، إلا أن الشاشة التي يبلغ مقاسها 17.64ملم × 4.95 ملم تحتلّ مساحة أكبر على معصم المستخدم. ولكن حتى مع هذه الشاشة التي تفوق حجم شاشة «شارج 2» بنحو 40 في المائة، لا يزال وزن «شارج 3» أخفّ ببضعة غرامات، والسبب يعود إلى استخدام الألمنيوم بدل الصلب المقاوم (الستانلس ستيل) في صناعته. ويبلغ سعره 149.95 دولار. يتميز «شارج 3» بنظام سوار جديد قابل للتبديل يمتدّ من جانبي الشاشة، بتصميم أكثر أناقة من الإصدار السابق الذي كان يأتي على شكل عروات بصلية الشكل. إنّ ميزة التبديل الجديدة في السوار تجعله أشبه بساعة «آيكونيك»، أي بتصميم أقرب إلى الساعات الكلاسيكية، يتيح ببساطة التغيير بين الزهري الذهبي أو الرمادي المعدني بدل حصر أطراف الشاشة.
عرض أنيق أتاح المظهر الأنيق الجديد والهيكل الأطول هذه المرة للشاشة فرصة احتلال واجهة العرض بالكامل وبشكل جميل. الشاشة مصنوعة من أوليد المونوكروم، ولكن استخدام «فيت بيت» الذكي لألوان الأبيض والرمادي يجعله يبدو حيوياً وعصرياً كما ساعات «آيكونيك» و«فيرسا». تظهر النصوص ولوائح الخيارات بعرض ساطع وسهل القراءة حتى على شاشة صغيرة بفضل دقة العرض العالية على الرغم من أن الشاشة ليست من نوع «رتينا». ولكنّ الأهم هو أن هذه الأخيرة باتت تعمل بتقنية اللمس بالكامل، في نقلة نوعية تميّزها عن إصدار «شارج 2». وكما قد تتوقعون، ستجدون أن التعامل مع تطبيقات الملاحة ولوائح الخيارات على «شارج 3» أكثر مرحاً. إذ إن التنقل بين التطبيقات على «شارج 2» كان يتطلّب النقر على زاوية الشاشة أو الضغط على الزرّ، مما يعتبر متخلفاً بعض الشيء في عام 2018. ولكن مع شاشة اللمس الجديدة في «شارج 3»، سيكون التنقل بين التطبيقات محبباً كما تريدون. امسحوا إلى اليسار لرؤية التطبيقات... امسحوا إلى الأعلى لرؤية «شاشة اليوم»... امسحوا إلى الأسفل لرؤية الإشعارات. إن كل ما تحتاجونه لاستخدام «شارج 3» هو النقرات والمسح على شاشتها، ولكن السوار الجديد مجهز أيضاً بزر أساسي صغير home button جداً في حافته اليسرى، إلا أنكم قد لا تلاحظونه في حال لم تقرأوا كتيب استخدامه.
شركة صينية تطوّر مرحاض سيارة يُشغَّل بالأوامر الصوتيةhttps://aawsat.com/%D8%AA%D9%83%D9%86%D9%88%D9%84%D9%88%D8%AC%D9%8A%D8%A7/5263011-%D8%B4%D8%B1%D9%83%D8%A9-%D8%B5%D9%8A%D9%86%D9%8A%D8%A9-%D8%AA%D8%B7%D9%88%D9%91%D8%B1-%D9%85%D8%B1%D8%AD%D8%A7%D8%B6-%D8%B3%D9%8A%D8%A7%D8%B1%D8%A9-%D9%8A%D9%8F%D8%B4%D8%BA%D9%91%D9%8E%D9%84-%D8%A8%D8%A7%D9%84%D8%A3%D9%88%D8%A7%D9%85%D8%B1-%D8%A7%D9%84%D8%B5%D9%88%D8%AA%D9%8A%D8%A9
شركة صينية تطوّر مرحاض سيارة يُشغَّل بالأوامر الصوتية
سيارات في صالة عرض في بكين 16 أبريل 2026 (أ.ف.ب)
سجّلت شركة صينية لصناعة السيارات براءة اختراع لمرحاض مخفي أسفل مقعد سيارة منزلق، ويمكن تشغيله باستخدام أوامر صوتية، وفق قاعدة بيانات حكومية، ووفق ما نقلته «وكالة الصحافة الفرنسية».
وأظهرت السجلات العامة أن شركة السيارات الكهربائية «سيريس» (Seres) نالت، في وقت سابق من هذا الشهر، الموافقة على براءة اختراع مرحاضها المتنقّل.
ويُمكن استخدام المرحاض يدوياً عبر إرجاع المقعد إلى الخلف، أو من خلال الأمر الصوتي «تشغيل المرحاض».
وقال مهندسو الشركة في ملف طلب براءة الاختراع إن هذا النظام يهدف إلى «تلبية احتياجات المستخدمين خلال الرحلات الطويلة، أو أثناء التخييم، أو عند المكوث داخل السيارة».
ويعمل نظام مروحة مع أنبوب عادم على تصريف الروائح إلى خارج السيارة، في حين تُجمع الفضلات في خزان يتطلّب التفريغ الدوري. كما يضمّ المرحاض عنصراً حرارياً دوّاراً يعمل على تبخير البول، وتجفيف الفضلات الأخرى.
وخلال السنوات الأخيرة، كشفت شركات السيارات الكهربائية في الصين عن طرازات مزوّدة بإكسسوارات لا تحصى، في مسعى إلى جذب المستهلكين في سوق شديدة التنافس.
وأصبحت ميزات مثل أنظمة الكاراوكي والثلاجات الصغيرة شائعة، فيما تقول شركة «نيو» (Nio) إن مقاعد بعض طرازاتها مزوّدة بخاصية «التدليك بالحجارة الساخنة».
وفي العام الماضي، أعلنت شركة «بي واي دي» (BYD)، الرائدة في القطاع، عن نظام ذكي لطائرات مسيّرة مدمجة في المركبات، بينما أفادت شركة «إكس بينغ» (XPeng) بأن عمليات تسليم سيارتها المعروفة باسم «حاملة الطائرات البرية»، وهي مركبة تحتوي على طائرة ذات ست مراوح، يُتوقّع أن تبدأ هذا العام.
ولا يزال من غير الواضح ما إذا كانت فكرة «سيريس» ستدخل مرحلة الإنتاج.
ولم ترد الشركة، التي تعاونت مع عملاق الاتصالات «هواوي» لتطوير خط سياراتها الفاخرة «آيتو»، على طلب «وكالة الصحافة الفرنسية» للتعليق.
نظام يتيح للروبوتات رباعية الأرجل تفادي العوائق قبل الاصطدامhttps://aawsat.com/%D8%AA%D9%83%D9%86%D9%88%D9%84%D9%88%D8%AC%D9%8A%D8%A7/5262713-%D9%86%D8%B8%D8%A7%D9%85-%D9%8A%D8%AA%D9%8A%D8%AD-%D9%84%D9%84%D8%B1%D9%88%D8%A8%D9%88%D8%AA%D8%A7%D8%AA-%D8%B1%D8%A8%D8%A7%D8%B9%D9%8A%D8%A9-%D8%A7%D9%84%D8%A3%D8%B1%D8%AC%D9%84-%D8%AA%D9%81%D8%A7%D8%AF%D9%8A-%D8%A7%D9%84%D8%B9%D9%88%D8%A7%D8%A6%D9%82-%D9%82%D8%A8%D9%84-%D8%A7%D9%84%D8%A7%D8%B5%D8%B7%D8%AF%D8%A7%D9%85
نظام يتيح للروبوتات رباعية الأرجل تفادي العوائق قبل الاصطدام
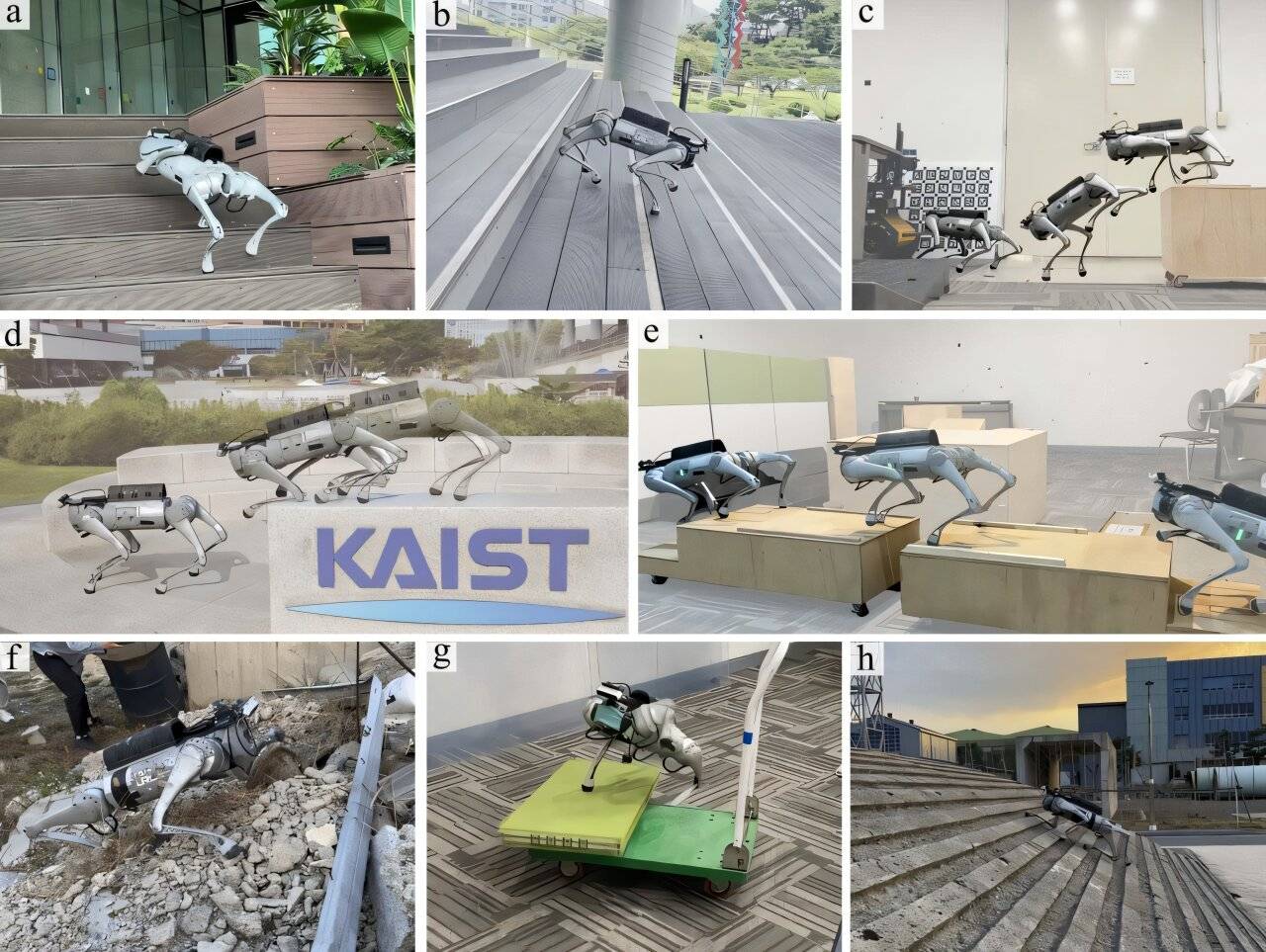
يعتمد النظام على دمج الإدراك الذاتي مع الرؤية الخارجية لمساعدة الروبوت على فهم العوائق قبل ملامستها (KAIST)
طوّر باحثون من المعهد الكوري المتقدم للعلوم والتكنولوجيا (KAIST) نظاماً جديداً للتحكم في الروبوتات رباعية الأرجل، حيث يهدف إلى جعل حركتها أقل اعتماداً على رد الفعل بعد الاصطدام بالعوائق، وأكثر قدرة على «رؤية» البيئة واتخاذ القرار أثناء الحركة. ويأتي هذا العمل تحت اسم «DreamWaQ++».
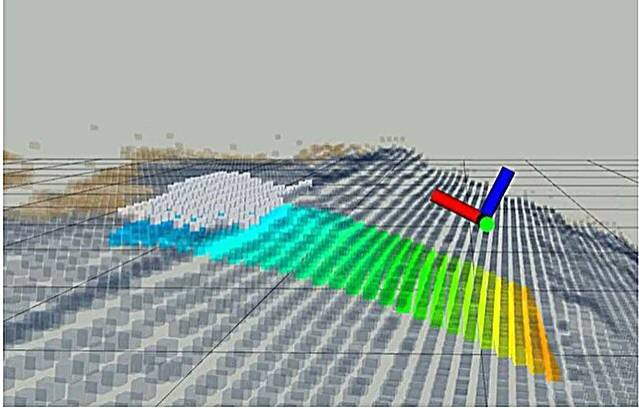
الفكرة ليس مجرد جعل الروبوت يمشي على تضاريس صعبة، بل تمكينه من الجمع بين نوعين من الإدراك في الوقت نفسه؛ الأول هو الإدراك الذاتي المرتبط بما يشعر به الروبوت من خلال مفاصله وحركته واتزانه، والثاني هو الإدراك الخارجي عبر الكاميرات و(LiDAR) «لايدار»، بحيث لا ينتظر الروبوت أن تلمس رجلاه العقبة كي يفهم ما أمامه، بل يحاول قراءتها مسبقاً، وتعديل طريقته في المشي وفقاً لذلك.
هذا تحديداً هو ما تعتبره الدراسة تجاوزاً لمحدودية كثير من الأنظمة السابقة، التي كانت تعتمد على الإحساس الداخلي فقط، أو تحتاج في المقابل إلى خرائط دقيقة ومعقدة للبيئة كي تستفيد من الرؤية الخارجية.
أظهرت الاختبارات تحسناً في معدلات النجاح مقارنة ببعض النماذج البصرية المرجعية في التعامل مع السلالم والعوائق غير المنتظمة (KAIST)
نحو حركة استباقية
أوضح فريق «KAIST» أن النسخة السابقة من النظام «DreamWaQ» كانت تتيح ما يشبه «المشي الأعمى»، أي القدرة على تقدير طبيعة الأرض من دون رؤية مباشرة، وهو ما يُفيد مثلاً في البيئات التي يصعب فيها الاعتماد على المعلومات البصرية، مثل الظلام أو الدخان. لكن هذا النهج كانت له حدود؛ حيث إن الروبوت كان يحتاج غالباً إلى ملامسة العائق أولاً قبل أن يعدّل حركته. أما «DreamWaQ++» فيحاول الانتقال من هذا النمط التفاعلي إلى نمط أكثر استباقية؛ حيث يتعرف الروبوت إلى العوائق قبل الوصول إليها، ويختار أسلوب الحركة المناسب في الزمن الحقيقي.
الدراسة تصف هذا الانتقال بوصفه دمجاً بين الإدراكين الداخلي والخارجي، عبر إطار تعلم تعزيزي متعدد الوسائط.
واستهدف الباحثون معالجة مشكلة معروفة في الروبوتات رباعية الأرجل؛ حيث تكون واعدة جداً للعمل في البيئات المزدحمة والمعقدة، لكنها تبقى حساسة لعدم اليقين في العالم الحقيقي، ما يجعل التحكم في حركتها تحدياً كبيراً. لذلك يقترح العمل الجديد طريقة تجعل الروبوت أكثر قدرة على اجتياز الأراضي الوعرة، والمنحدرات الحادة، والسلالم العالية، مع الحفاظ على درجة من الصمود حتى في الحالات الخارجة عن التوزيعات التي تدرب عليها.
بين الرؤية والإحساس
الأهمية هنا ليست أكاديمية فقط، فواحدة من المشكلات العملية في الروبوتات المتحركة هي أن الرؤية وحدها لا تكفي دائماً، والإحساس الذاتي وحده لا يكفي أيضاً. إذا اعتمد الروبوت على «الإحساس الداخلي» فقط، فقد يضطر إلى اختبار الأرض برجله أولاً، ما يبطئ الحركة، ويزيد خطر التعثر أو الاصطدام. وإذا اعتمد على الرؤية الخارجية وحدها، فقد يحتاج إلى نمذجة شديدة الدقة للبيئة، وهو أمر صعب في المواقع غير المنتظمة أو المتغيرة باستمرار. يحاول «DreamWaQ++» سد هذه الفجوة عبر المزج بين الحالتين، بحيث يتحرك الروبوت بناءً على ما «يراه» وما «يشعر به» معاً.
ومن المؤشرات اللافتة التي ظهرت في المادة المصاحبة للمشروع، أن النظام حقق في اختبارات المحاكاة على 1000 روبوت، معدلات نجاح أعلى بنحو 20 إلى 40 في المائة، مقارنة ببعض النماذج البصرية المرجعية عبر تكوينات مختلفة من السلالم. كما أشارت الصفحة التعريفية للمشروع إلى أن النظام يتعامل مع السلالم غير المتماثلة عبر تكييف حركة رفع الرجل وفق شكل العائق، وهي نقطة مهمة لأن كثيراً من البيئات الحقيقية لا تأتي في صورة سلالم أو حواف مثالية وثابتة.
يعكس هذا التطور اتجاهاً أوسع نحو جعل الروبوتات أكثر قدرة على الحركة الذكية في بيئات واقعية وغير مضمونة (KAIST)
تحسن في الأداء
هذا النوع من التقدم يعكس اتجاهاً أوسع في عالم الروبوتات يتعلق بالانتقال من الحركة المستقرة في بيئات مضبوطة إلى الحركة الذكية في بيئات غير مضمونة. فمن الناحية النظرية، يمكن أن يفتح ذلك المجال أمام استخدامات أكثر واقعية في مواقع الكوارث، والمناطق الصناعية، والبيئات المزدحمة أو غير المنتظمة؛ حيث لا تكون الأرضية مهيأة سلفاً، ولا يمكن افتراض أن الروبوت سيعمل دائماً في ظروف مثالية. ويرى الفريق إمكان توسيع هذه التقنية إلى منصات أخرى، مثل الروبوتات ذات العجلات والأرجل أو حتى الروبوتات الشبيهة بالبشر.
مع ذلك، لا يعني هذا أن الروبوت بات «يفكر» كما يفعل الإنسان بالمعنى الحرفي. ما يقدمه البحث هو تحسن في الإدراك الحركي، واتخاذ القرار أثناء التنقل وليس وعياً تاماً أو فهماً شاملاً للبيئة. لكنه يظل تقدماً مهماً؛ لأن الحركة في العالم الواقعي هي واحدة من أصعب المشكلات في الروبوتات: الأرض قد تكون غير مستقرة، والعقبات قد تكون غير منتظمة، والاستجابة يجب أن تكون سريعة بما يكفي لتجنب السقوط أو التوقف. وفي هذا السياق، فإن تمكين الروبوت من تعديل خطاه قبل الاصطدام، لا بعده، يُمثل فرقاً جوهرياً في فلسفة الحركة نفسها.
«إنفيديا» تطرح نموذج «إيزينغ» لتقريب الحوسبة الكمية من الاستخدام العمليhttps://aawsat.com/%D8%AA%D9%83%D9%86%D9%88%D9%84%D9%88%D8%AC%D9%8A%D8%A7/5262608-%D8%A5%D9%86%D9%81%D9%8A%D8%AF%D9%8A%D8%A7-%D8%AA%D8%B7%D8%B1%D8%AD-%D9%86%D9%85%D9%88%D8%B0%D8%AC-%D8%A5%D9%8A%D8%B2%D9%8A%D9%86%D8%BA-%D9%84%D8%AA%D9%82%D8%B1%D9%8A%D8%A8-%D8%A7%D9%84%D8%AD%D9%88%D8%B3%D8%A8%D8%A9-%D8%A7%D9%84%D9%83%D9%85%D9%8A%D8%A9-%D9%85%D9%86-%D8%A7%D9%84%D8%A7%D8%B3%D8%AA%D8%AE%D8%AF%D8%A7%D9%85-%D8%A7%D9%84%D8%B9%D9%85%D9%84%D9%8A
«إنفيديا» تطرح نموذج «إيزينغ» لتقريب الحوسبة الكمية من الاستخدام العملي
يركز «إيزينغ» على معالجة اثنتين من أصعب العقبات الهندسية التي تعوق الاستخدام العملي للأنظمة الكمية (غيتي)
تُحاول «إنفيديا» ترسيخ موقعها بعمق أكبر في سباق الحوسبة الكمية، لكن ليس عبر بناء معالج كمي جديد، بل من خلال طرح سؤال أكثر إلحاحاً: كيف يمكن جعل الأجهزة الحالية الهشّة أكثر استقراراً، وأسهل في الإدارة، وأقرب إلى الاستخدام العملي؟
خلال حدث تقني مباشر لـ«إنفيديا» عبر الإنترنت، حضرته «الشرق الأوسط»، أعلنت الشركة، الثلاثاء، إطلاق «إيزينغ» (Ising) الذي تصفه بأنه أول عائلة نماذج ذكاء اصطناعي مفتوحة المصدر مصممة بشكل خاص للمساعدة في الحوسبة الكمية. ولا يتركز هذا التوجه على تطبيقات الذكاء الاصطناعي الموجهة للمستهلك أو على المساعدات العامة، بل على عقبتين تقنيتين مزمنتين لا تزالان تعرقلان تقدم هذا القطاع، وهما معايرة المعالجات، وتصحيح الأخطاء الكمية. وتقول «إنفيديا» إن «إيزينغ» صُمم لمساعدة الباحثين والمؤسسات على تحسين هذين الجانبين.
ما أهمية الخطوة؟
على مدار سنوات، طُرحت الحوسبة الكمية بوصفها تقنية قادرة على إحداث تحول جذري في مجالات مثل علوم المواد والكيمياء ومعالجة المشكلات المعقدة بكفاءة عالية. ومع ذلك، لا تزال الفجوة واسعة بين هذا الوعد والتطبيق العملي الفعلي. فالمعالجات الكمية شديدة الحساسية، وسهلة التأثر بالضوضاء، وقد يتدهور أداؤها بمرور الوقت، كما أنها ترتكب أخطاء بمعدلات تفوق بكثير تلك الخاصة بالحواسيب التقليدية. لذلك، فإن الوصول إلى أنظمة كمية مفيدة لا يقتصر على تطوير «كيوبتات» أفضل فحسب، بل يتطلب أيضاً تحسين أساليب مراقبة هذه الأجهزة وضبطها وتصحيح أخطائها أثناء التشغيل. وفي هذا السياق تحديداً، تسعى «إنفيديا» إلى ترسيخ موقعها.
تحاول «إنفيديا» تقديم الذكاء الاصطناعي بوصفه جزءاً من البنية التشغيلية للحوسبة الكمية لا مجرد تطبيق فوقها (إنفيديا)
الذكاء لضبط الكم
تضم عائلة «إيزينغ» مكونين رئيسيين، الأول هو «إيزينغ كالِبرايشن» (Ising Calibration)، وتصفه الشركة بأنه نموذج بصري - لغوي قادر على تفسير القياسات الصادرة من المعالجات الكمية والمساعدة في أتمتة عملية المعايرة، أي الضبط المتكرر الذي تحتاج إليه هذه الأنظمة كي تظل تعمل ضمن حدود مقبولة. أما الثاني فهو «إيزينغ ديكودينغ» (Ising Decoding)، ويستهدف تصحيح الأخطاء الكمية؛ حيث يتمثل التحدي في رصد الإشارات المشوشة وتفسيرها في الزمن الحقيقي، بحيث يستطيع النظام استنتاج نوع الخطأ الذي حدث، وكيفية التعامل معه. وتُعدّ «إنفيديا» أن نماذجها في هذا المجال يمكن أن تعمل بسرعة تصل إلى 2.5 مرة أعلى مع دقة تفوق الأساليب التقليدية بثلاث مرات.
قد تبدو هذه الأرقام طموحة، لكن الأهمية الأوسع لهذا الإعلان تكمن في مكان آخر. تحاول «إنفيديا» عملياً القول إن الذكاء الاصطناعي قد يُصبح جزءاً من البنية التشغيلية الأساسية للحوسبة الكمية، وليس مجرد تطبيق يعمل فوقها. وضمن هذا التصور، لا يُستخدم الذكاء الاصطناعي لكتابة النصوص أو توليد الصور، بل للمساعدة في تشغيل الآلة نفسها بوصفها قراءة المخرجات وتفسير الحالات المعقدة وإدارة دورات المعايرة ودعم تصحيح الأخطاء بسرعة كافية لجعل الأنظمة الكمية أكثر قابلية للتوسع.
وهذه حجة أكثر واقعية من كثير من الخطابات الواسعة التي أحاطت بكل من الذكاء الاصطناعي والحوسبة الكمية في السنوات الأخيرة، فكثيراً ما وجد قطاع الحوسبة الكمية نفسه عالقاً بين التقدم العلمي والضجيج التسويقي، مع إعلانات تُركّز على اختراقات مستقبلية من دون أن تحل التحديات الهندسية التي ما زالت تحدُّ من الانتشار الفعلي. وما يُميز خطوة «إنفيديا» هنا أنها تُركز على إحدى هذه الطبقات غير اللامعة، ولكنها حاسمة، أي أنظمة الحوسبة التقليدية والبرمجيات اللازمة لجعل العتاد الكمي قابلاً للاستخدام.
الشبكة الكمومية الجديدة تعمل بدرجة حرارة الغرفة وباستخدام الألياف البصرية الحالية ما يجعلها قابلة للتطبيق العملي اليوم (غيتي)
سبب اختيار «إيزينغ»
الحوسبة الكمية لا تزال مجالاً متشعباً؛ حيث تتبع الشركات والمختبرات مسارات مختلفة في بناء العتاد، من «الكيوبتات» فائقة التوصيل إلى الأيونات المحصورة والذرات المتعادلة. وبالتالي فإن نظاماً مغلقاً مصمماً وفق افتراضات ضيقة ستكون قيمته محدودة. أما النهج المفتوح المصدر، فيمنح الباحثين مساحة أكبر لتكييف النماذج مع أجهزتهم وبيئاتهم وبياناتهم الخاصة. وتشير «إنفيديا» إلى أن الحزمة تشمل نماذج قابلة للتخصيص، وأدوات وبيانات تدريب ودعماً للنشر، مع إتاحة تشغيل النماذج محلياً لحماية المعلومات الحساسة أو الملكية.
وقد يكون هذا الجانب المتعلق بالتشغيل المحلي مهماً بشكل خاص للمؤسسات البحثية والشركات. فعملية تطوير الحوسبة الكمية غالباً ما تعتمد على بيانات معايرة شديدة التخصص، ومعايير تشغيل مرتبطة بكل جهاز، وسير عمل خاص بكل جهة. وإذا كان الذكاء الاصطناعي سيلعب دوراً في تشغيل هذه الأنظمة، فمن الطبيعي أن ترغب كثير من المؤسسات في الاحتفاظ بسيطرة مشددة على أماكن وجود البيانات، وكيفية تدريب النماذج أو تخصيصها. ويبدو أن «إنفيديا» تُحاول الاستجابة لهذه المسألة مباشرة عبر تقديم «إيزينغ» ليس فقط بوصفه قوياً، بل أيضاً قابلاً للتكييف وملائماً للبنية التحتية القائمة.
رهان على التبني
استغلت الشركة الإعلان لتؤكد أن لديها بالفعل دعماً مبكراً من أطراف داخل المنظومة. فقد ذكرت عدداً من الشركات والجامعات والمختبرات الوطنية التي تتبنى أجزاء من «إيزينغ»، من بينها «أكاديميا سينيكا»، و«فيرميلاب»، وكلية «جون إيه بولسون» للهندسة والعلوم التطبيقية في جامعة هارفارد، و«آي كيو إم كوانتوم كومبيوترز»، و«مختبر لورنس بيركلي الوطني» عبر «منصة الاختبار الكمية المتقدمة»، و«المختبر الوطني الفيزيائي» في المملكة المتحدة. وفي جانب فك التشفير أو «الديكودينغ»، أشارت «إنفيديا» إلى مستخدمين، مثل جامعة كورنيل، ومختبر سانديا الوطني، وجامعة كاليفورنيا في سان دييغو، وجامعة كاليفورنيا في سانتا باربرا، وجامعة شيكاغو، وجامعة يونسي.
وتكتسب هذه الأسماء أهميتها؛ لأنها توحي بأن «إنفيديا» لا تطرح هذه النماذج فقط على أنها منصة مستقبلية تنتظر نضوج السوق، بل تحاول إدخال «إيزينغ» في قلب سير العمل الحالي داخل قطاع البحث والتطوير الكمي. وهذا لا يعني أن النماذج أثبتت بالفعل، وعلى نطاق واسع، قدرتها على حل كبرى مشكلات القطاع. لكنه يُشير إلى أن الشركة تسعى إلى تثبيت حضورها الآن، في وقت لا يزال فيه المجال يُحدد أي الأدوات والتقنيات ستصبح معياراً مستقبلياً.
تستهدف الشركة عبر هذا الطرح تعزيز استقرار الأنظمة الكمية وقابليتها للتوسع والاعتماد العملي (شاتر ستوك)
الاستراتيجية الأوسع لـ«إنفيديا»
أمضت «إنفيديا» السنوات الأخيرة في ترسيخ موقعها ليس فقط مورداً لرقائق الذكاء الاصطناعي، بل مزود لمنظومات حوسبة متكاملة. وفي السياق الكمي، يعني ذلك ربط «إيزينغ» بمنظومتها القائمة من البرمجيات والعتاد، بما في ذلك «كودا-كيو» (CUDA-Q) للحوسبة الهجينة بين الأنظمة الكمية والتقليدية، و«إن في كيو لينك» (NVQLink) لربط وحدات المعالجة الكمية بوحدات معالجة الرسومات من أجل التحكم اللحظي وتصحيح الأخطاء.
وعند النظر إلى هذه الخطوة بهذا الشكل، فإن «إيزينغ» لا يبدو إطلاقاً منفصلاً، بل هو جزء من محاولة لجعل «إنفيديا» طرفاً لا يمكن الاستغناء عنه في مستقبل تتكامل فيه الأنظمة الكمية والتقليدية بشكل متزايد، وبدلاً من منافسة شركات العتاد الكمي مباشرة على مستوى «الكيوبتات»، تُحاول الشركة أن تصبح الطبقة التي تُساعد تلك الأنظمة على العمل والتوسع والاندماج مع الحوسبة التقليدية المتسارعة.
ولهذا تحديداً يكتسب الإعلان أهميته، فهو ينقل النقاش من السؤال المعتاد: مَن يملك المعالج الكمي الأكثر تقدماً؟ إلى سؤال أصعب: ما الذي سيكون مطلوباً فعلاً لجعل الأجهزة الكمية مفيدة خارج العروض التجريبية المحدودة؟
ومن غير المرجح أن تكمن الإجابة في العتاد وحده، فالمعايرة وتصحيح الأخطاء وأدوات البرمجيات وتصميم الأنظمة الهجينة، أصبحت كلها عناصر مركزية في المرحلة المقبلة من تطور هذا القطاع.
ومن هذا المنظور، لا يبدو إعلان «إنفيديا» محاولة لإعلان اختراق حاسم بقدر ما يبدو تحديداً لمواضع العمل الحقيقي التي لا تزال قائمة. فصناعة الحوسبة الكمية لا تحتاج فقط إلى معالجات أفضل، بل إلى وسائل أفضل للتحكم فيها، وتفسير أدائها، والحفاظ على موثوقيتها بالقدر الذي يسمح لها بإنجاز شيء ذي معنى.